

Viene illustrata una tecnica per realizzare la protesi provvisoria del paziente prima della chirurgia: utilizzando un software di programmazione chirurgica e le relative tecniche di creazione in reverse del modello master si inseriscono nella protesi provvisoria gli stessi sistemi di bloccaggio intra-orale utilizzati per la dima chirurgica in modo da semplificare gli aspetti critici del suo posizionamento e bloccaggio intra-orale durante la fase di installazione e ribasatura post-chirurgica.
Alberto Serafini*
Andrea Depaoli**
*Medico Chirurgo, Specialista in Odontostomatologia, libero professionista, Bolzano
**titolare laboratorio BluLa, Mattarello (TN)
Riassunto
L’introduzione dei protocolli di carico immediato ha rappresentato un’evoluzione positiva per i pazienti totalmente edentuli non più costretti a rimanere senza protesi durante le fasi di guarigione e ha richiesto nuovi protocolli e nuove procedure con aspetti complessi da risolvere. Per esempio, a fine chirurgia rimane critico il posizionamento corretto della protesi provvisoria durante le fasi di ribasatura, soprattutto in arcata inferiore, ancor più nelle tecniche che prevedono l’uso di impianti angolati come nella All-on-four. La metodica proposta descrive un metodo per realizzare la protesi provvisoria del paziente prima della chirurgia: utilizzando un software di programmazione chirurgica e le relative tecniche di creazione in reverse del modello master si inseriscono nella protesi provvisoria gli stessi sistemi di bloccaggio intra-orale utilizzati per la dima chirurgica in modo da poterla poi posizionare in bocca con semplicità e ripetibilità.
L’implantologia osteointegrata ha conosciuto uno sviluppo veloce e costante, dalle sue prime applicazioni negli anni ’80 fino a oggi, con l’adozione di protocolli chirurgici e protesici variamente modificati per rispondere alle diverse esigenze degli operatori e dei pazienti.
In particolare per i pazienti che richiedono riabilitazioni full-arch sono stati sviluppati protocolli di carico immediato per evitare l’uso di protesi totali provvisorie complete durante la fase di guarigione degli impianti o di eventuali precedenti estrazioni strategiche1-3.
Un ruolo importante nello sviluppo di queste riabilitazioni full-arch a carico immediato è stato promosso dall’introduzione del concetto di All-on-four da parte del Dr. Malò e della sua equipe4. Questo gruppo di lavoro ha dimostrato di raggiungere un elevato livello di successo biologico e clinico a lungo termine utilizzando un numero limitato di impianti grazie alla validazione di principi biologici affidabili e protocolli tecnici precisi, sia in mandibola che in arcata superiore, evitando per molti pazienti edentuli la necessità di ricorrere a complesse chirurgie ricostruttive e limitando i costi economici delle riabilitazioni5.
Il protocollo originale prevede di inserire due impianti diritti nelle aree anteriori di mandibola o pre-maxilla e due impianti angolati nelle aree posteriori per superare gli ostacoli anatomici presenti e correggendo poi i sottosquadri tra gli impianti con abutment angolati fino a 35°.
Se gli impianti raggiungono una corretta stabilità meccanica vengono successivamente sottoposti a carico immediato adattando una protesi provvisoria in resina acrilica opportunamente modificata e ribasata su cilindri per provvisorio in titanio avvitati agli abutment sugli impianti.
Dovendo utilizzare un limitato numero di impianti è fondamentale il loro posizionamento spaziale corretto per soddisfare i requisiti biologici di carico, le necessità estetiche della protesi e la loro mantenibilità igienica domiciliare e si rende quindi necessario un adeguato training chirurgico-protesico per accedere a questa tecnica di non facile applicazione.
Inoltre la delicata fase di applicazione della protesi provvisoria, che segue la messa a dimora degli impianti, presenta aspetti di criticità legati alla difficoltà di assicurarle una posizione spaziale ripetibile in fase di ribasatura, soprattutto nell’arcata inferiore che non fornisce una base di appoggio stabile come il palato 6-8.

Obiettivo
Lo scopo di questo lavoro è di illustrare una tecnica che, partendo da una programmazione virtuale dell’intervento con software dedicato alla chirurgia implantare, consenta di realizzare una protesi provvisoria che preveda gli stessi sistemi di fissaggio intra-orale della dima chirurgica e possa così semplificare gli aspetti critici del suo posizionamento e bloccaggio intra-orale durante la fase di installazione e ribasatura post-chirurgica.
Tecnica
Il primo obiettivo da soddisfare per la realizzazione di questo manufatto provvisorio è la necessaria ripetibilità della sua posizione in cavità orale durante le fasi di ribasatura. Per fare questo occorre essere certi della posizione di inserimento degli impianti per cui è fondamentale utilizzare un software di programmazione affidabile che garantisca le minori variazioni possibili tra la programmazione virtuale e l’effettivo risultato della fase chirurgica9-12.
Per la realizzazione dei nostri casi clinici abbiamo utilizzato un software di programmazione implantare (NobelClinician, Nobel Biocare) e un sistema di chirurgia guidata (NobelGuide, Nobel Biocare) per la loro versatilità, semplicità e precisione di funzionamento.
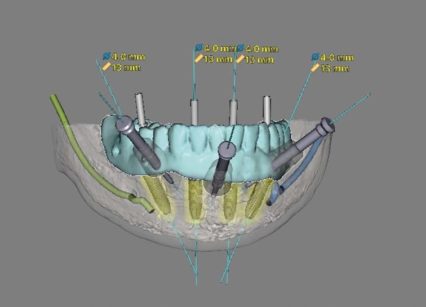
Una volta acquisiti i dati della Tac del paziente e realizzata la programmazione virtuale dell’intervento (Figura 1) è possibile richiedere la produzione di una dima chirurgica contenente i manicotti di guida delle frese e degli impianti e dei suoi sistemi di bloccaggio in cavità orale (Figura 2).
Partendo quindi dalla dima chirurgica con un processo di reverse-mode si produce un modello master in gesso in cui vengono inglobate sia le repliche degli impianti che i manicotti degli anchor-pin previsti per la stabilizzazione della dima in fase chirurgica (Figure 3-6).




Al modello master, montato in articolatore per riprodurne la posizione spaziale intra-orale, vengono avvitati gli abutment dritti e angolati, i cilindri provvisori e vengono adattati i denti protesici provvisori in occlusione, inglobando tutto con una resina arricchita di fibre di vetro che garantisce una maggiore resistenza al carico durante le fasi di integrazione degli impianti (Figure 7-11).





Altri manicotti per gli anchor-pin vengono poi integrati nel provvisorio il quale presenterà dei fori di apertura limitata in corrispondenza della fuoriuscita dei cilindri di titanio avvitati agli impianti e che rimarranno inglobati nella resina durante le procedure di ribasatura post-chirurgia (Figura 12).

La presenza sul provvisorio dei manicotti per gli anchor-pin nella stessa posizione che hanno nella dima chirurgica consentirà di alloggiare in bocca la protesi in maniera spazialmente corretta e ripetibile durante tutte le fasi di ribasatura, permettendo di utilizzare una minore quantità di resina a freddo (Figure 13-15).





Tutto questo è reso possibile soltanto dalla corrispondenza precisa tra la posizione programmata degli impianti – quindi come stabilita sul modello di gesso – e quella ottenuta in fase chirurgica, grazie all’affidabilità e precisione del software (NobelClinician, Nobel Biocare) (Figure 16-18).
Discussione
Le procedure di carico immediato per pazienti sottoposti a riabilitazione implantare full-arch, in special modo nella tecnica All-on-four messa a punto dal Dr. Malò e collaboratori, presentano alcuni momenti di criticità legati alla posizione spaziale terminale delle teste degli impianti, con la possibile difficoltà di inserimento della protesi provvisoria destinata al carico immediato e anche alla necessità di riuscire a tenerla bloccata nella posizione spaziale corretta durante la fase di iniezione e di indurimento della resina a freddo per la ribasatura sui cilindri provvisori avvitati agli impianti.
La posizione degli impianti può oggi essere determinata in maniera prevedibile con l’uso dei software di programmazione che hanno conosciuto uno sviluppo sostanziale negli ultimi 10 anni e che aiutano i clinici ad ottenere un risultato molto più accurato e ripetibile potendo calcolare con precisione sia l’angolazione relativa degli impianti tra loro che rispetto ai piani ossei ed anche l’angolazione relativa e la rotazione sull’asse degli abutment protesici, con una cura del dettaglio rispetto ai tessuti duri e molli sicuramente non paragonabile alla programmazione cosiddetta “brain-guided” o alla chirurgia free-hand.
Il sistema di programmazione da noi utilizzato (NobelClinician, Nobel Biocare) prevede per le arcate completamente edentule l’allestimento di una dima radiografica con alcuni marcatori radiopachi, normalmente una dentiera correttamente eseguita e utilizzata dal paziente, che verrà poi trasformata in protesi provvisoria nella fase di carico immediato post-chirurgica.
La scansione Tac di questa dima unita ai dati dicom dell’osso del paziente consente di avere una immagine tridimensionale navigabile con tutti i dati necessari alla programmazione virtuale dell’intervento e conduce alla realizzazione di una dima chirurgica con appositi sistemi di bloccaggio intra-orale come atto finale del flusso digitale.
L’analisi del funzionamento del sistema ci ha suggerito l’idea di sfruttarne le capacità intrinseche per modificare il protocollo di carico immediato, normalmente utilizzato nei casi di riabilitazione su arcata completamente edentula.
Il razionale della metodica sfrutta il principio che con la programmazione digitale si inseriscono gli impianti nella posizione pianificata utilizzando una dima chirurgica provvista di sistemi di bloccaggio intra-orale che è la copia esatta della protesi provvisoria del paziente; è quindi possibile utilizzare gli stessi sistemi di bloccaggio intra-orale della guida chirurgica per posizionare e ribasare anche la protesi provvisoria a fine chirurgia.
Il procedimento è reso possibile dal fatto che abbiamo una guida chirurgica con la quale possiamo costruire un modello master con le tecniche comunissime di reverse-cast e modificare appositamente la protesi provvisoria dotandola degli stessi alloggiamenti per i sistemi di fissaggio intra-orale di cui è dotata la guida.
Una volta conclusa la fase chirurgica il clinico potrà alloggiare la protesi provvisoria in bocca bloccandola con gli anchor-pin usati durante la chirurgia e portando a termine la ribasatura in maniera semplice e soprattutto prevedibile anche dal punto di vista dei contatti occlusali che sappiamo essere fondamentali per le fasi iniziali di carico.
Questa nostra iniziale intuizione è stata testata e ulteriormente sviluppata attraverso alcuni casi clinici e ci ha consentito di perfezionare la metodica, che comunque richiede una ottima competenza e una stretta collaborazione tra odontotecnico e chirurgo, aiutando in maniera semplice e veloce l’operatore nella delicata fase di finalizzazione dell’intervento.
Nell’applicazione della metodica abbiamo registrato dei limiti da tenere presenti: il più importante è la necessità di avere i cilindri provvisori – e quindi gli abutment avvitati agli impianti – nella posizione più parallela possibile tra loro per evitare eccessivi sottosquadri e di conseguenza una difficoltà di inserimento intra-orale del provvisorio.
Inoltre i fori di ingresso praticati nella protesi provvisoria per superare tali sottosquadri potrebbero risultare troppo larghi, indebolendola eccessivamente e determinando un maggiore rischio di frattura in fase di guarigione degli impianti; per questo abbiamo deciso di utilizzare sia in fase di produzione che di ribasatura del provvisorio una resina duale a base di diacrilato arricchita con fibre di vetro molto stabile e resistente che si è mostrata estremamente versatile ed efficace.
Altra precauzione da rispettare riguarda la necessità di utilizzare questa resina rigida in quantità adeguata anche per bloccare i manicotti degli anchor pin; essi infatti soprattutto in arcata inferiore sono sottoposti a forze tangenziali importanti durante il reinserimento dei pin e rischiano di distaccarsi dal provvisorio inficiando la procedura.
La metodica, denominata “FELP - Fast and Easy Loading Procedure ”, è stata ideata per casi di All-on-four, ma comunque ben si adatta anche ai casi di riabilitazione full-arch con un numero maggiore di impianti.
Saranno necessari ancora casi clinici per poter validare perfettamente tale procedura che comunque si presenta già da adesso molto promettente per semplificare le metodiche descritte di carico immediato.
Fast and Easy Loading Procedure (FELP). Provisional prosthesis management system in immediate loading rehabilitations
Summary
Immediate loading protocols in implantology represent a positive evolution especially for total edentulous patients which have not to remain without teeth during implants healing period but they needed to tune new protocols and procedures with some critical issues to solve. For example, at the end of surgery, it’s always difficult to maintain in good position the provisional prosthesis during the relining phase, especially for the mandible and in the procedures with tilded implants like the All-on-four concept. In this article we describe a new procedure to realize the provisional prosthesis of patient before the surgery: using a software for guided surgery to plan the implants position and the reverse-mode techniques to achieve the master cast of patient we insert in the temporary prosthesis the same anchor-pin sleeve of the surgery guide; in this way it is possible to put it correctly in place and reline in a very fast and easy way.
- Cochran DL, Morton D, Weber HP. Consensus statement and recommended clinical procedures regarding loading protocols for endosseous dental implants. Int J Oral Maxillofac Implant 2004;19 suppl:109-13.
- Esposito M, Grusovin MG, Maghaireh H, Worthington HV. Interventions for replacing missing teeth: different times for loading dental implants. Cochrane Database Syst Rev. 2013; 3 CD003878.
- Dierens M, Collaert B, Deschepper E, et al. Patient-centered outcome of immediately loaded implants in the rehabilitation of fully edentulous jaws. Clin Oral Implants Res 2009 Oct;20(10):1070-7.
- Malò P, de Araujo Nobre M, Lopes A. All-on-four immediate-function concept for completely edentulous maxillae: a clinical report on the medium (3 years) and long-term (5 years) outcomes. Clin. Impl. Dent.Relat. Res. 2012;14 Suppl.1:e 139-150.
- Malò P, de Araujo Nobre M, Lopes A et al. A longitudinal study of the survival of the All-on-four implants in the mandible with up to 10 years of follow-up. J Am Dent Assoc 2011;142: 310-20.
- Agliardi EL, Pozzi A, Stappert CF, et al. Immediate fixed rehabilitation of the edentulous maxilla: a prospective clinical and radiological study after 3 years of loading. Clin Impl Dent Relat Res 2014 Apr;16(2):292-302.
- Patzelt SB, Bahat O, Reinolds MA, Strub JR. The All-on four treatment concept: a sistematic review. Clin Implant Dent Relat Res 2014 Dec;16(6): 836-55.
- Penarrocha-Diago M, Penarrocha-Diago M, Zaragozí-Alonso R, et al. Consensus statement and clinical recommendations on treatment indications, surgical procedures, prosthetic protocols and complications following All-on-four standard treatment. 9th Mozo-Grau Ticare Conference in Quintanilla- Spain. I.Clin. Exp. Dent 2017 May 1; 9(5): e 712-e715.
- van Steenberghe D., Glauser R, Blomback U, et.al. A computed tomographic scan-derived customized surgical template and fixed prosthesis for flapless surgery and immediate loading of implants in fully edentulous maxillae. A prospective multicenter study. Clin. Implant. Dent. Relat Re. 2005; 7 (suppl. 1): 511-520.
- Malò P., de Araujo Nobre M., Lopes A. The use of computer-guided flapless implant surgery and four implants placed in immediate function to support a fixed denture: Preliminary results after a mean follow-up of thirteen months. Send to Prosthet Dent. 2007Jun;97(6 Suppl):S26-34.
- Pozzi A, Tallarico M, Marchetti M, et al. Computer-guided versus free-hand placement of immediately loaded dental implants: 1-year post loading results of a multicentre randomised controlled trial. Eur J Oral Implantol 2014 Autumn; 7(3):229-42.
- Hämmerle CH, Cordaro L, van Assche N. Digital technologies to support planning,treatment and fabrication processes and outcome assesments in implant dentistry. Summary and consensus statements. The 4th EAO consensus conference 2015. Clin Oral Impl Res 2015 Sep; 26 Suppl. 11: 97-101
- Van Assche N, Vercruyssen M, Coucke W,et al. Accuracy of computer-aided implant placement. Clin Oral Impl Res 2012; Suppl 23(6):112-123.






{kind=link}