

Riassunto
La diagnostica strumentale consente oggi di elaborare i dati anatomici del Paziente in modo completo e di elaborare un piano di trattamento completo e personalizzato. Grazie al lavoro di squadra, in cui ogni componente del Team è specialista nelle competente specifiche, è possibile trasferire la pianificazione virtuale, eseguita a partire dalle immagini radiologiche attraverso il software, in una guida chirurgica che consente al Clinico di posizionare gli impianti in modo ottimizzato alla riabilitazione protesica e funzionale del proprio Paziente. L’utilizzo di queste procedure è vincolato ad una serie di parametri che devono essere rispettati per ottenere un risultato sicuro e predicibile.
Summary
The diagnostic imaging technology enables today to process the Patient anatomy data in a 3D way and to make a complete and customized treatment plan.
Thanks to the Team work, where every component is a specialist in the specific competency, it is possible to transfer the virtual planning, managed through the software starting from the radiologic images, in a surgical guide that enables the Surgeon to place the implants optimized to the Patient prosthetic and functional rehabilitation.
The use of these procedures is tied to a serie of parameters which must be respected in order to grant a secure and predictable result.
La progettazione computer-assistita del piano di riabilitazione implanto-protesico consente di ridurre i rischi operatori derivanti da eventuali deviazioni anatomiche o condizioni patologiche del paziente, ridurre l’invasività dell’intervento e ottimizzare il posizionamento degli impianti in funzione di una riabilitazione protesica adeguata al recupero funzionale rispettando i canoni di estetica, fonetica, dimensione verticale e corretto rapporto occlusale1.
Lo stato dell’arte della chirurgia moderna si basa sulla crescita e sul perfezionamento di tecnologie diagnostiche in grado di fornire al chirurgo informazioni sempre più precise sull’anatomia del paziente, consentendo un’accurata definizione del piano di trattamento in caso di interventi di chirurgia dentale e maxillo-facciale. Attraverso l’impiego di ricostruzioni multiplanari e strumenti di navigazione virtuale è possibile interagire dinamicamente con il modello 3D del paziente per valutare approcci chirurgici differenti prima di entrare in sala operatoria.

ed è stata successivamente eseguita una regolarizzazione della cresta ossea,
al fine di evitare un gummy smile al termine della riabilitazione.
Il piano di trattamento viene infatti progettato a priori attraverso software dedicati che permettono di interagire dinamicamente con la TC/CBCT del paziente e simulare il risultato dell’approccio chirurgico stabilito.
La fase diagnostica e di pianificazione su software può essere poi trasferita nella pratica clinica attraverso l’utilizzo di dime chirurgiche che guidano in modo predicibile gli impianti dentali nella posizione progettata sul paziente virtuale2.
La possibilità di adottare una procedura di chirurgia guidata e il conseguente carico immediato portano indubbi vantaggi in termini di maggiore predicibilità in fase operatoria3 con conseguente riduzione dello stress per il clinico, maggiore confidenza da parte del paziente4 e ottimizzazione dei tempi legati alle procedure chirurgiche. La realizzazione di una protesi provvisoria a carico immediato, dove applicabile, garantisce al paziente un trattamento rapido ed efficace.
Materiali e metodi
La procedura di chirurgia guidata adottata nei casi clinici presentati in questo articolo (RealGUIDE - 3DIEMME, Italia) prevede che il paziente sia sottoposto a scansione radiografica (TC spirale o conebeam) con una guida radiologica in bocca che determina la posizione protesica ottimale per una riabilitazione ideale.
Sulla base del volume osseo rilevato si esegue con un software dedicato la pianificazione implantare virtuale che si traduce nella costruzione di una guida chirurgica e di una eventuale protesi provvisoria a carico immediato.
Operazioni preliminari
Prima di sottoporre il paziente all’esame tomografico è necessario prendere un’impronta di precisione delle sue arcate, il registro occlusale e l’arco facciale, seguendo gli stessi criteri utilizzati per costruire l’articolatore del paziente. Per le impronte è consigliabile impiegare un alginato di qualità che permetta di riprodurre con precisione le arcate dentali (inclusi i tuber e il fornice gengivale). I modelli di lavoro conseguenti sono realizzati con gesso extra duro di classe 4 avendo cura di eliminare eventuali difetti presenti sulla superficie.
Il registro occlusale consente di montare correttamente i modelli in articolatore. Il registro (in silicone o cera) può essere realizzato in massima intercuspidazione (per edentulia parziale) o in relazione centrica (per riabilitazioni totali).


Con la presa dell’arco facciale di trasferimento si concludono le operazioni da effettuare sulla poltrona con il paziente. L’arco facciale anatomico consente di montare in articolatore il modello mascellare orientato correttamente rispetto al piano asse-orbitale.
Guida radiologica
La costruzione della guida radiologica è un passo particolarmente importante nella progettazione della chirurgia guidata, in quanto da questo elemento si ricavano le informazioni essenziali per una buona pianificazione virtuale e riabilitazione protesica. La dima radiologica deve essere stabile e costruita in base al corretto piano occlusale, dimensione verticale e supporto dei tessuti molli. Deve inoltre rispettare i vincoli di funzione, estetica e fonetica.


La procedura RealGUIDE impiegata prevede di realizzare la dima radiologica con un marker di riferimento extra-orale (3DMARKER) che permetterà poi di inserire all’interno delle immagini TC le informazioni derivanti dalla dima radiologica stessa e dal modello in gesso.
Di seguito sono elencati i dettagli sulla costruzione delle dime radiologiche per edentulia parziale e totale, riportati anche nelle sequenze operative dei casi clinici illustrati.

Edentulia parziale
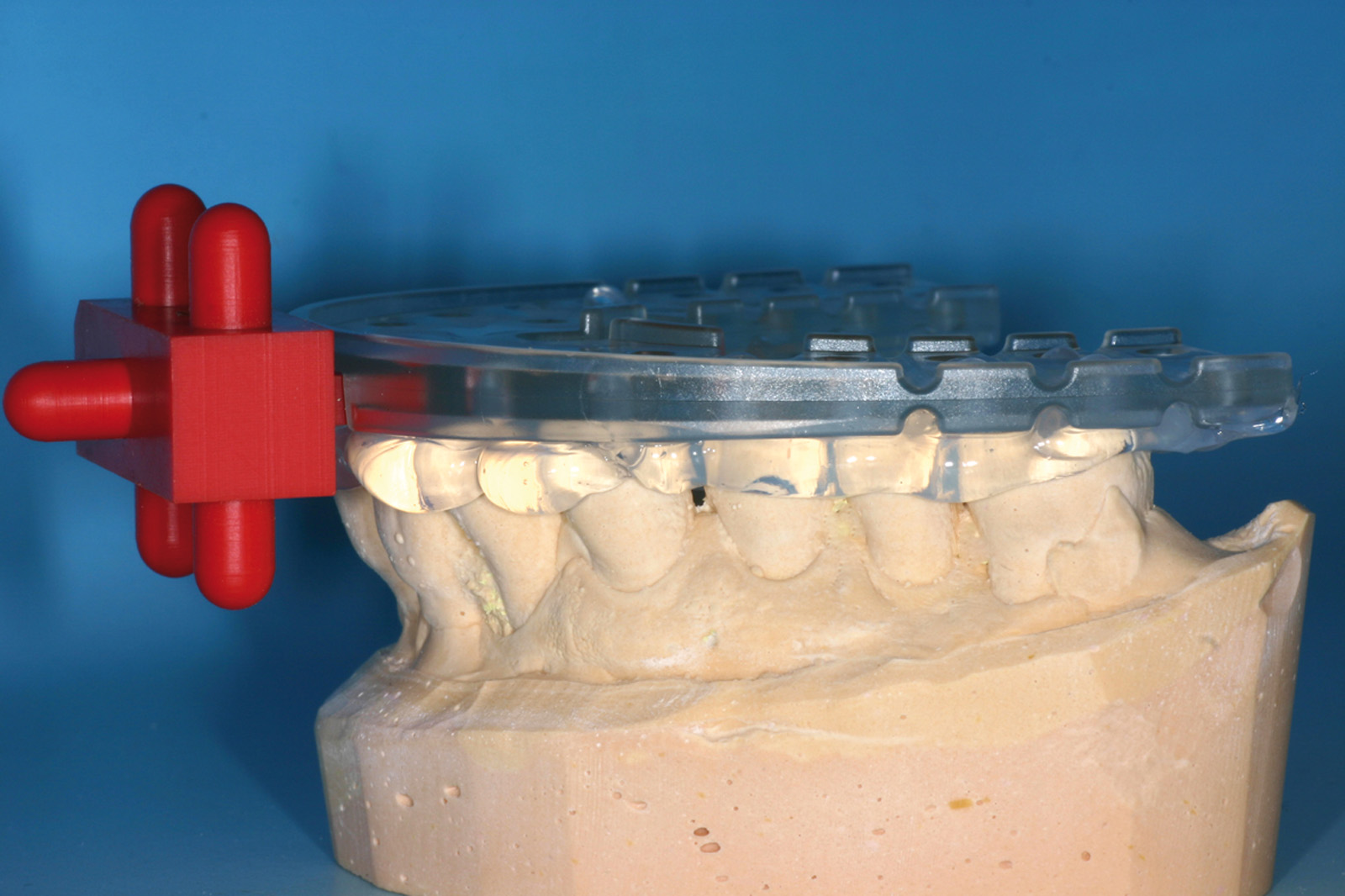
Partendo dai modelli in gesso del paziente, dopo aver stampato un disco in acrilico di spessore 1 mm si procede alla ceratura diagnostica o al montaggio dei denti del commercio. Si realizza una mascherina in silicone per il ripristino della zona edentula da riabilitare e si procede allo stampaggio della mascherina posizionando nella zona frontale il 3DMARKER (elemento di riferimento extraorale per la fusione computer-assistita tra la TC e la scansione ottica dei modelli e della guida radiologica del paziente).







Edentulia totale
Se il paziente è portatore di protesi mobile che soddisfa tutti i requisiti estetico-funzionali è possibile ottenere la dima radiologica mediante duplicazione di precisione della protesi stessa. Per garantire un’ottima aderenza ai tessuti è consigliabile ribasare la protesi prima della duplicazione. Si cola del gesso di tipo 4 nella protesi ribasata, si procede poi al montaggio in articolatore con antagonista e cera di centrica e si duplica la protesi in muffola con gelatina o silicone. Il posizionamento e il fissaggio del 3DMARKER avviene nella zona frontale della dima radiologica, in corrispondenza degli incisivi, a circa 1 mm dalla superficie vestibolare dei denti. Se la protesi del paziente non soddisfa i requisiti di stabilità e funzionalità, si procede con il confezionamento di una nuova protesi da scansione a partire dai modelli in gesso.

Si effettua così il montaggio in articolatore con antagonista e cera di centrica, e il montaggio estetico senza flangia vestibolare e con denti del commercio per valutazione estetica e funzionale in studio. La duplicazione della prova estetica deve avvenire con resina trasparente e prevedere il ripristino della flangia vestibolare. Il posizionamento del 3DMARKER avviene nella zona frontale della dima radiologica, in corrispondenza degli incisivi, a circa 1 mm dalla superficie vestibolare dei denti.
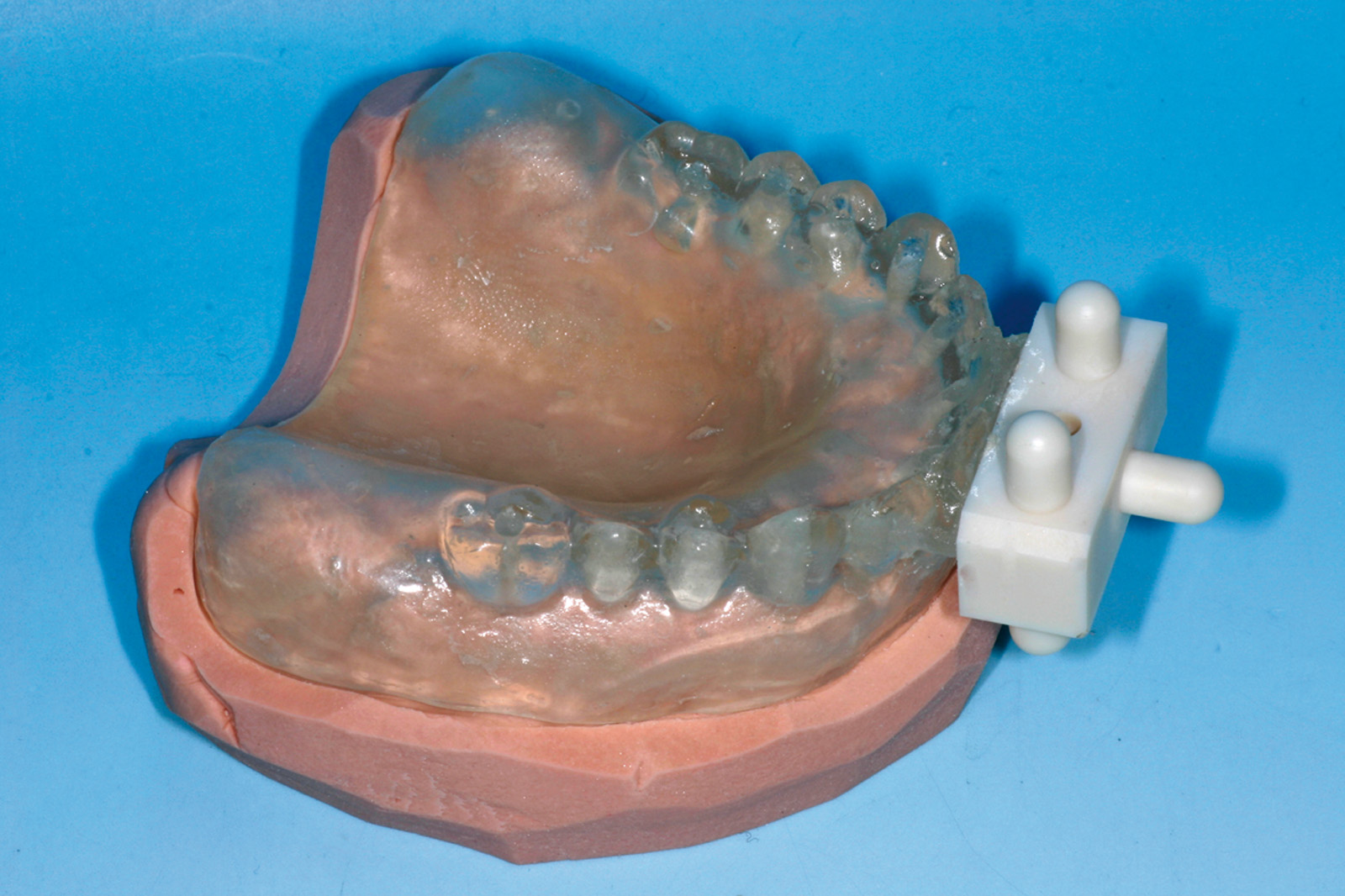
Per garantire la stabilità delle dime radiologiche al momento della scansione CT/CBCT si realizza un indice occlusale in silicone.
Scansione ottica dei modelli e delle guide radiologiche
La scansione ottica del modello in gesso e della dima radiologica fornisce due file in formato STL (aperto) che saranno inseriti all’interno dell’esame TC. Con questa operazione si rende ben identificabile sulle immagini tomografiche lo spessore delle mucose in modo diretto (non per differenza tra osso e guida radiologica rilevata dall’esame CBCT), la forma precisa dei denti (se presenti) senza artefatti e la ceratura diagnostica.
La scansione dei modelli può essere eseguita con qualsiasi scanner da laboratorio che consenta l’esportazione del file in formato STL. Si effettua una doppia scansione ottica, prima del modello in gesso e poi del modello con dima radiologica montata (gestita come se fosse un wax-up). Durante la scansione del modello bisogna porre particolare attenzione nell’includere tutte le zone anatomiche, comprese le porzioni posteriori e i fornici. Durante la scansione della dima radiologica si devono ricostruire con accuratezza il repere radiologico e la ceratura diagnostica.
Si esportano le scansioni in due file STL separati, con gli oggetti posti nello stesso sistema di riferimento.

Esame TC/CBCT
Una volta verificata la perfetta calzata in bocca della dima radiologica e dell’eventuale indice occlusale si invia il paziente al centro radiologico per l’esecuzione dell’esame tomografico.
La TC/CBCT deve essere realizzata con una singola scansione che includa le regioni anatomiche d’interesse e il 3DMARKER. L’esportazione delle immagini assiali deve avvenire in formato standard DICOM 3 non compresso.




Software planning
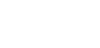
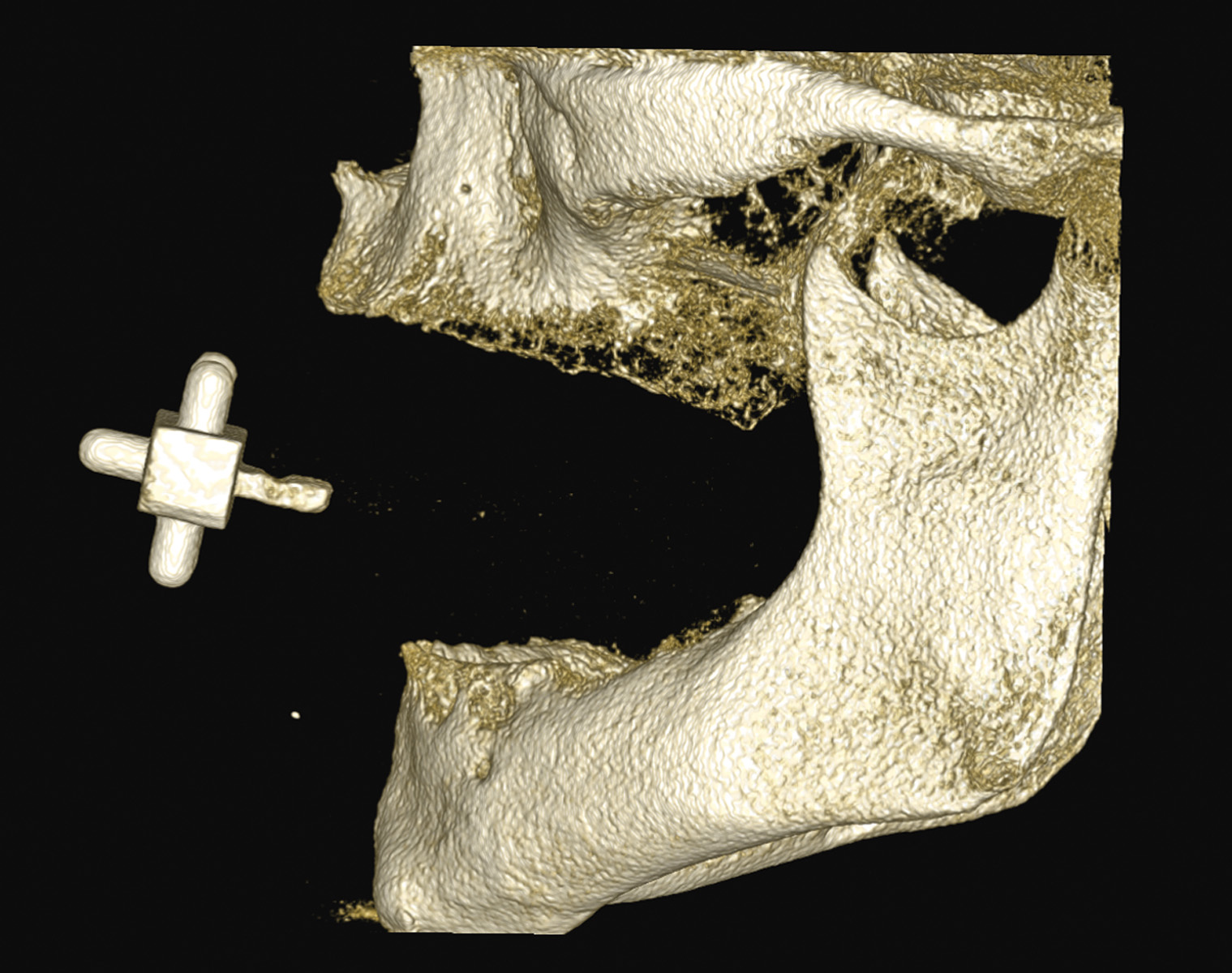
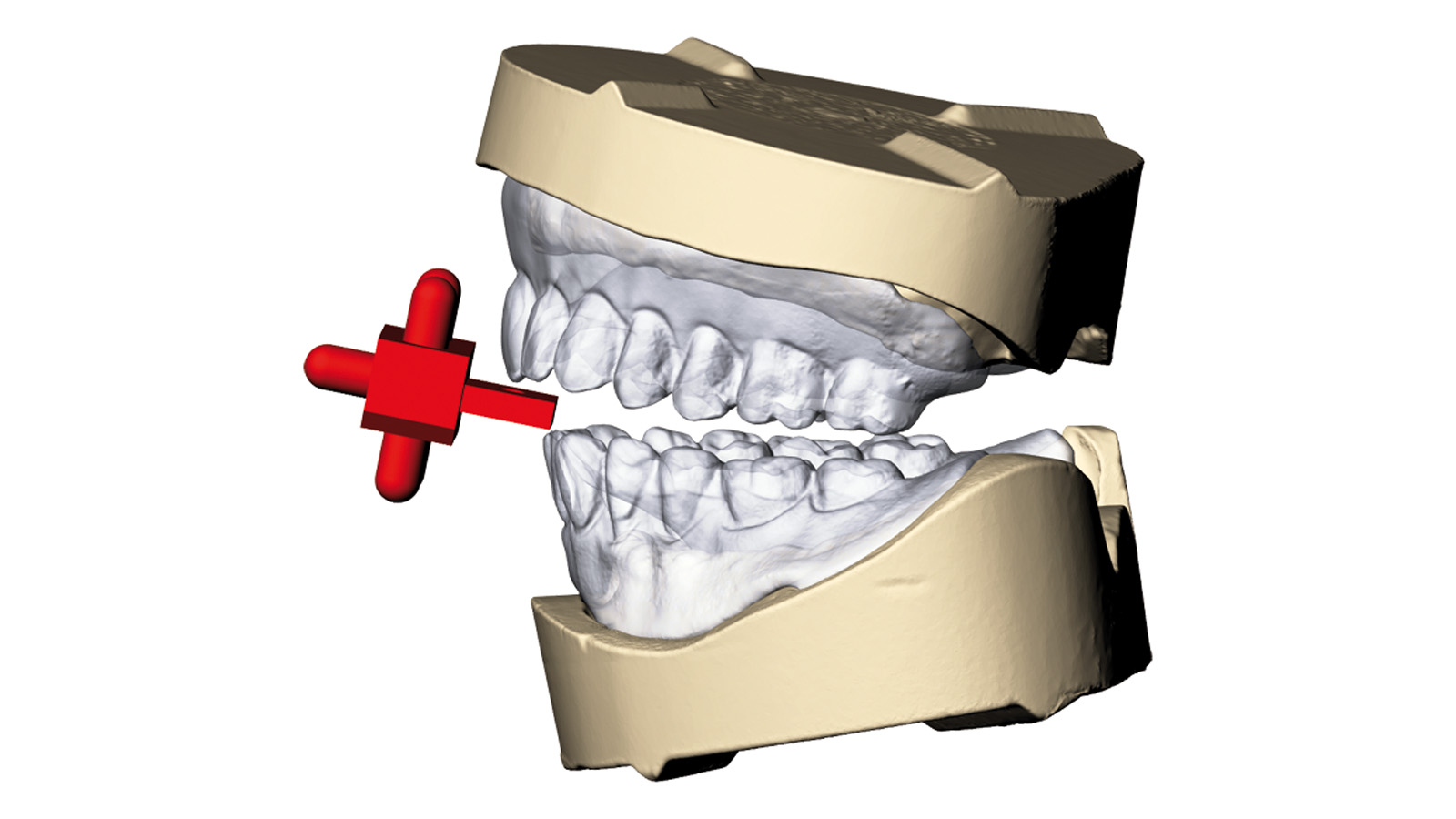
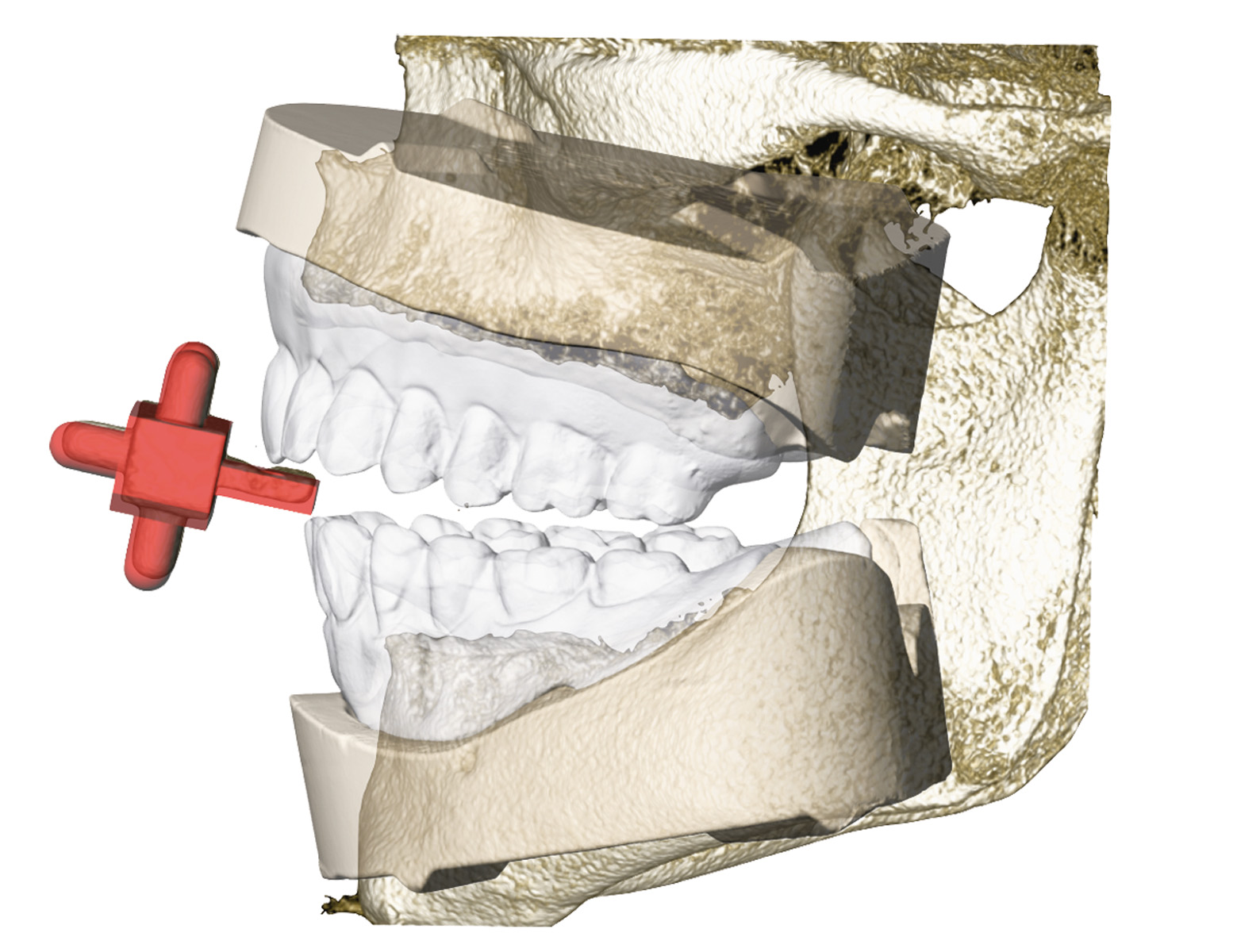
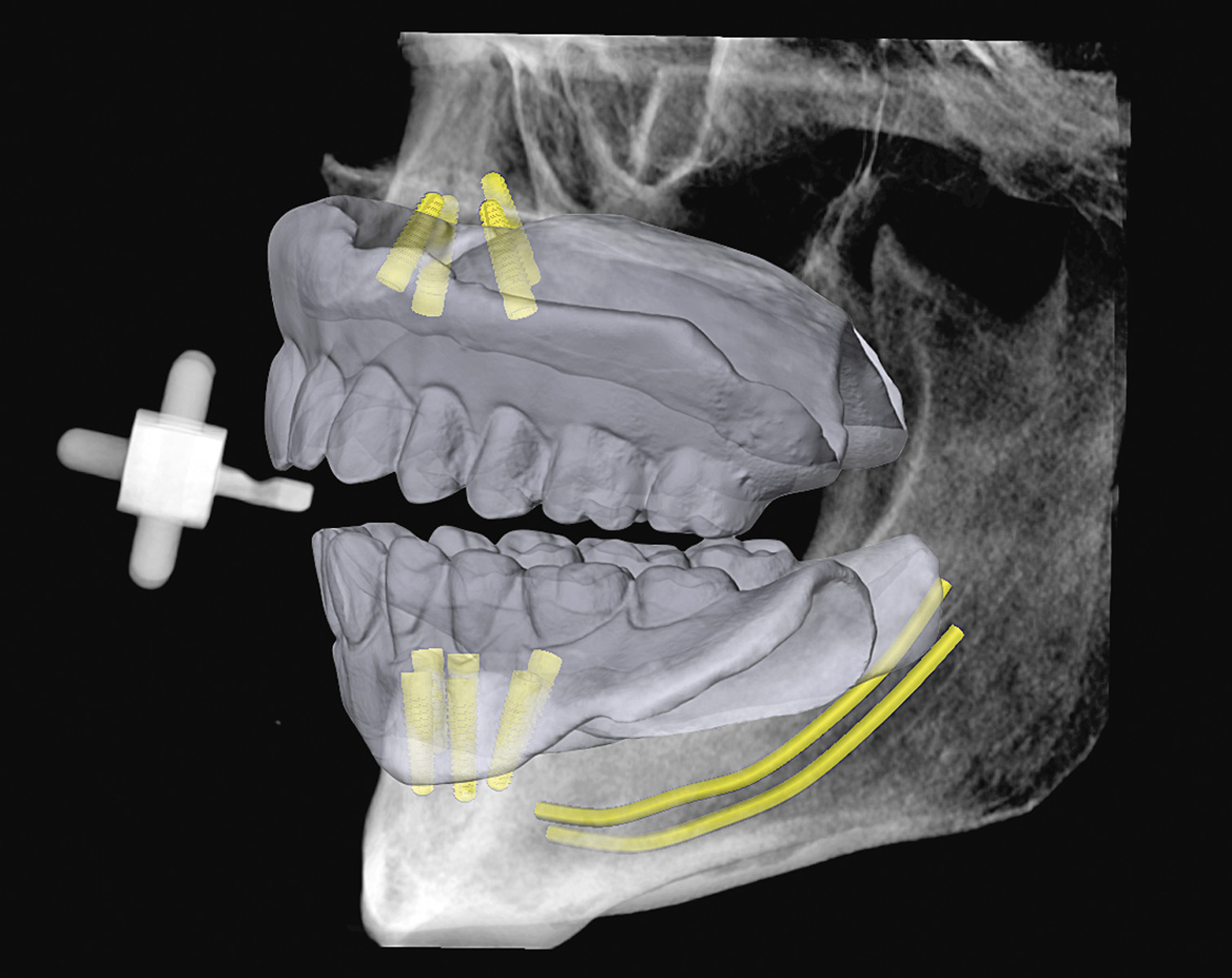
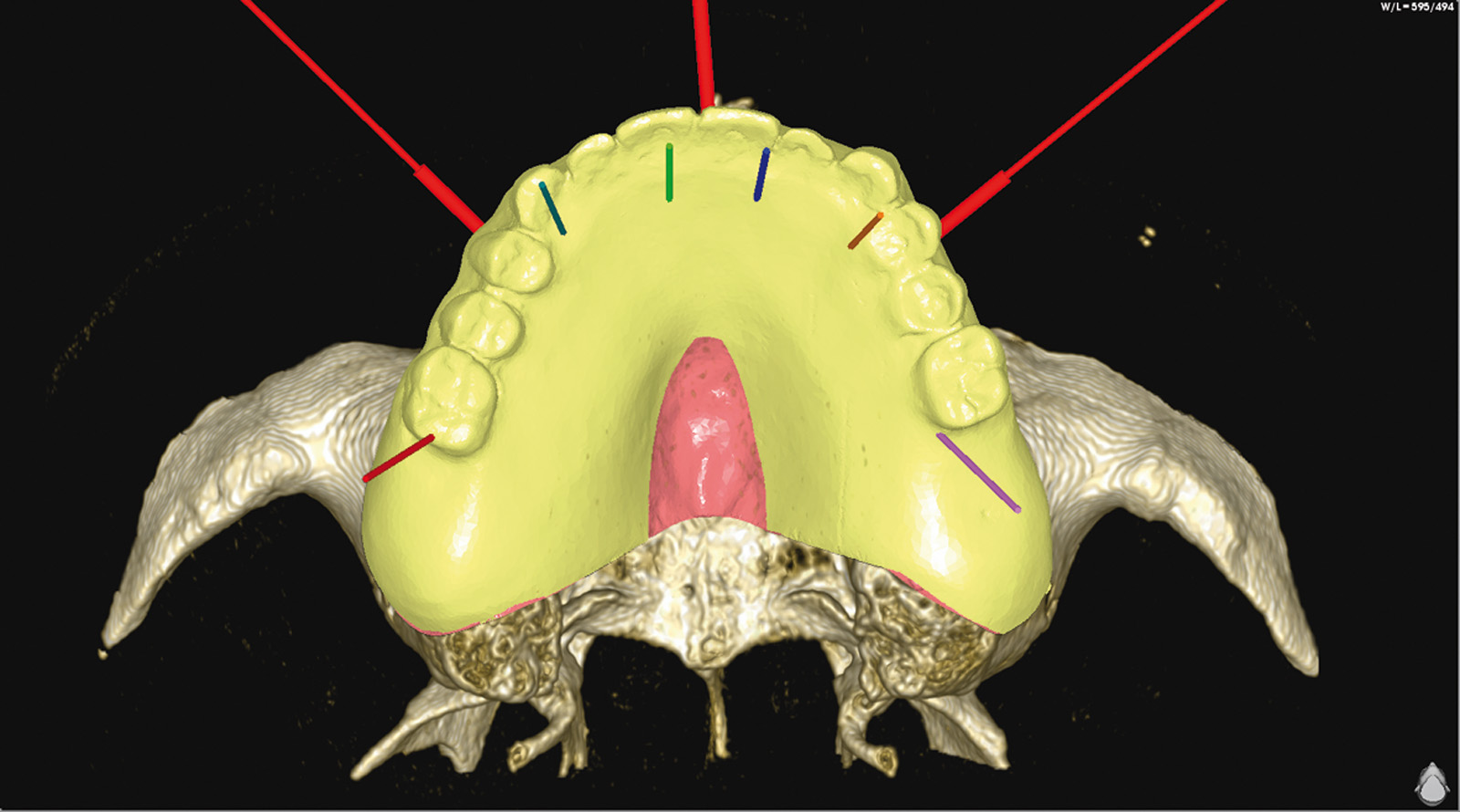
I file STL derivanti dalla scansione ottica del modello da impronta e della dima radiologica sono riposizionati via software nel sistema di riferimento dell’esame TC/CBCT grazie al repere extra-orale ancorato rigidamente alla mascherina radiologica, visibile sia nelle immagini radiologiche che nei file di scansione ottica.
Il matching tra le scansioni ottiche e l’esame tomografico è effettuato sulla base di un robusto algoritmo di posizionamento adattativo sviluppato all’interno del software che permette di riconoscere e allineare il volume del marker della TC a quello ricavato dalla scansione della dima radiologica e di verificare la corrispondenza delle zone anatomiche circostanti.






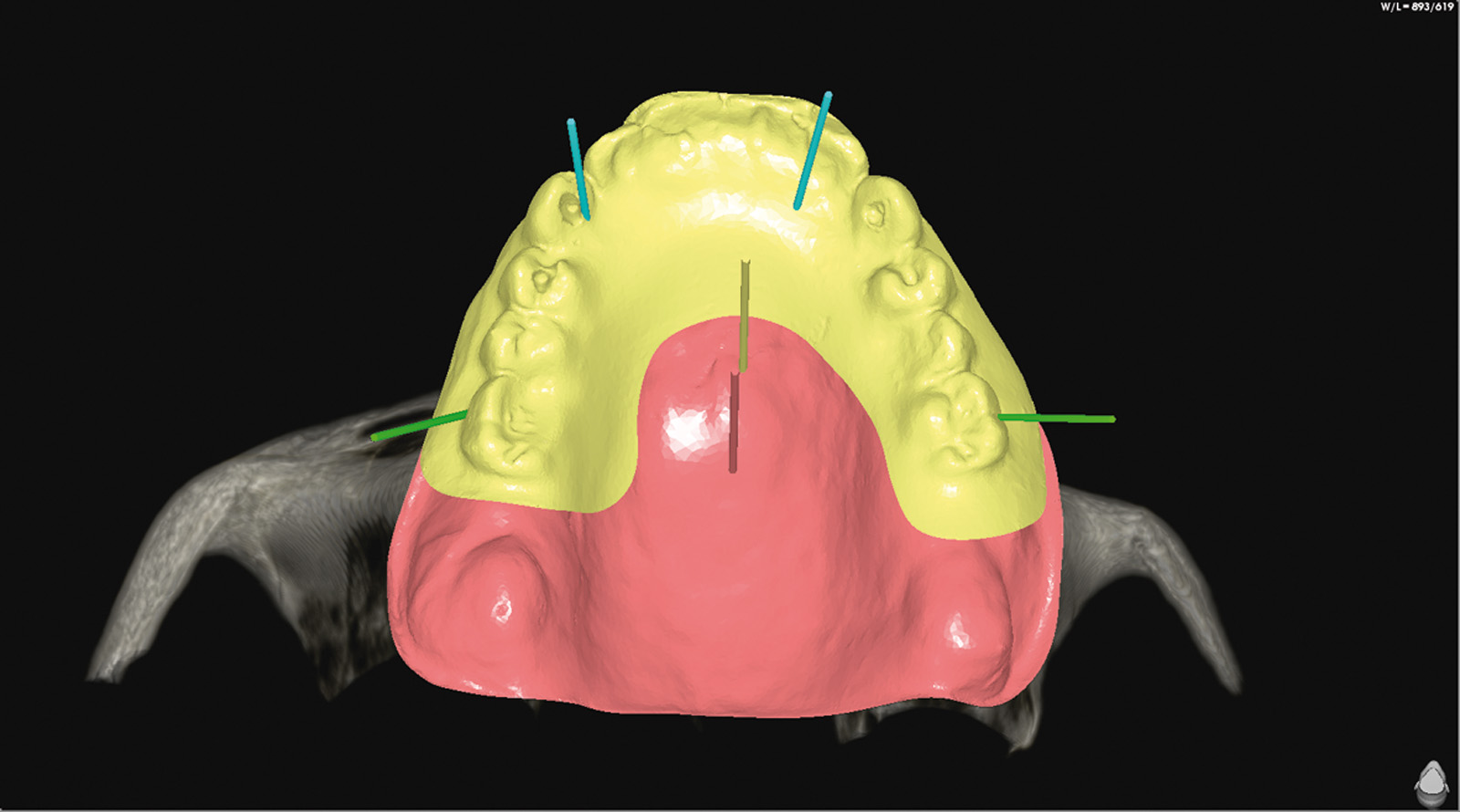
La matrice di trasformazione ottenuta dall’allineamento tra i volumi dei 3DMARKER è utilizzata per riportare anche il file della scansione del modello da impronta nel sistema di riferimento della TC/CBCT, ottenendo così un modello virtuale completo del paziente, con superficie di appoggio della guida chirurgica (denti o gengiva) indipendente dalla qualità delle immagini radiologiche o dai parametri di segmentazione anatomica scelti dall’operatore.
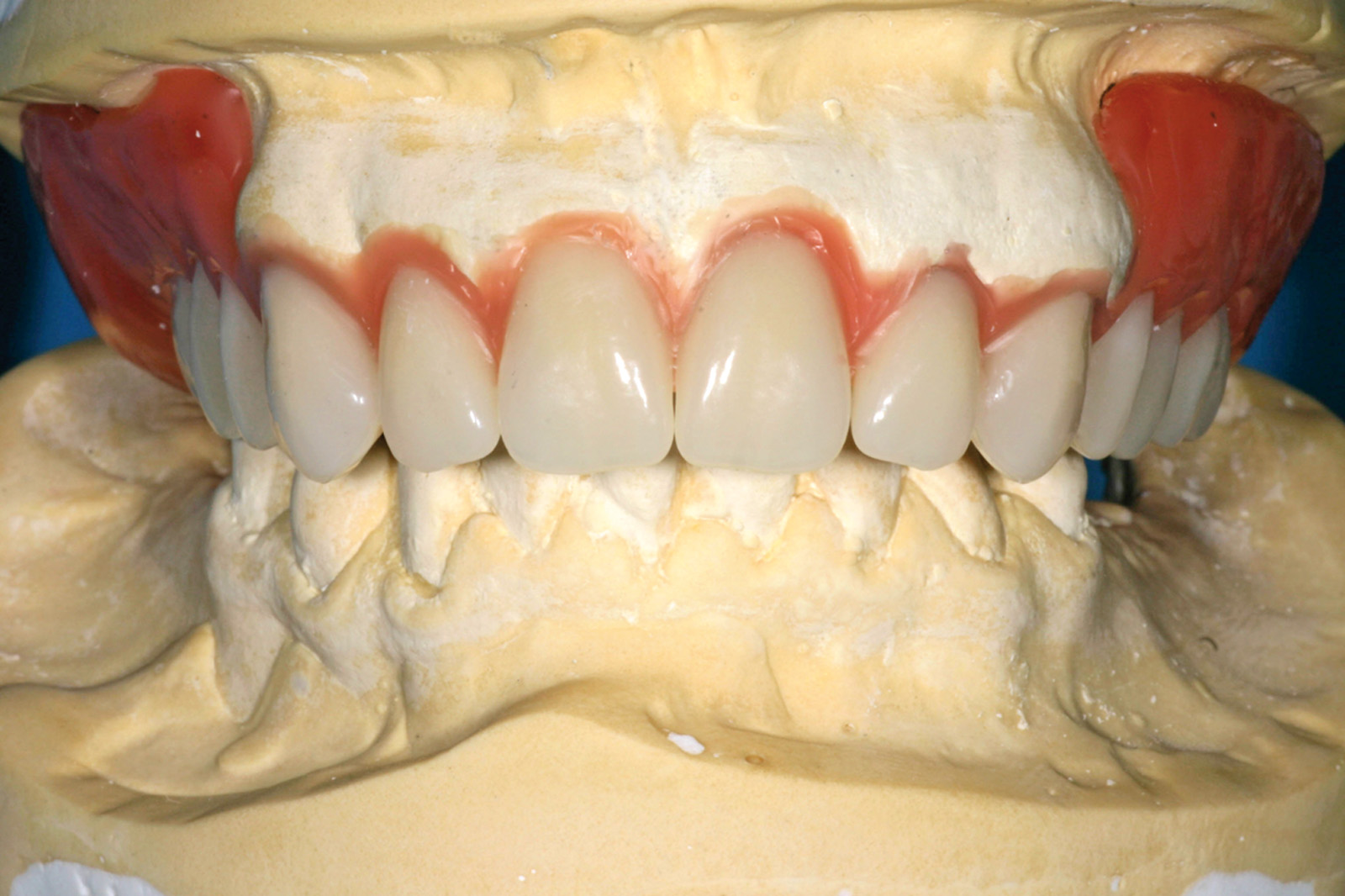
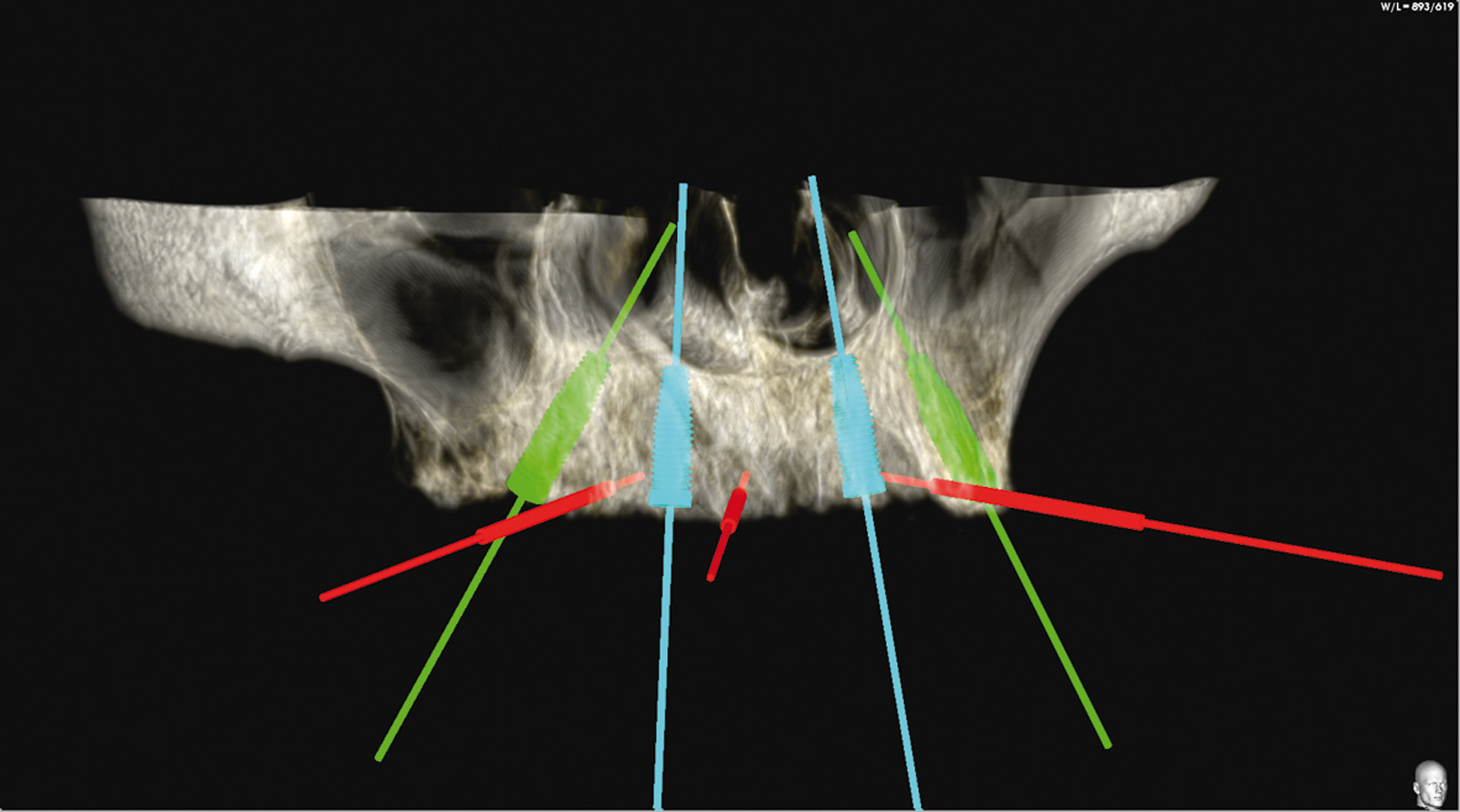
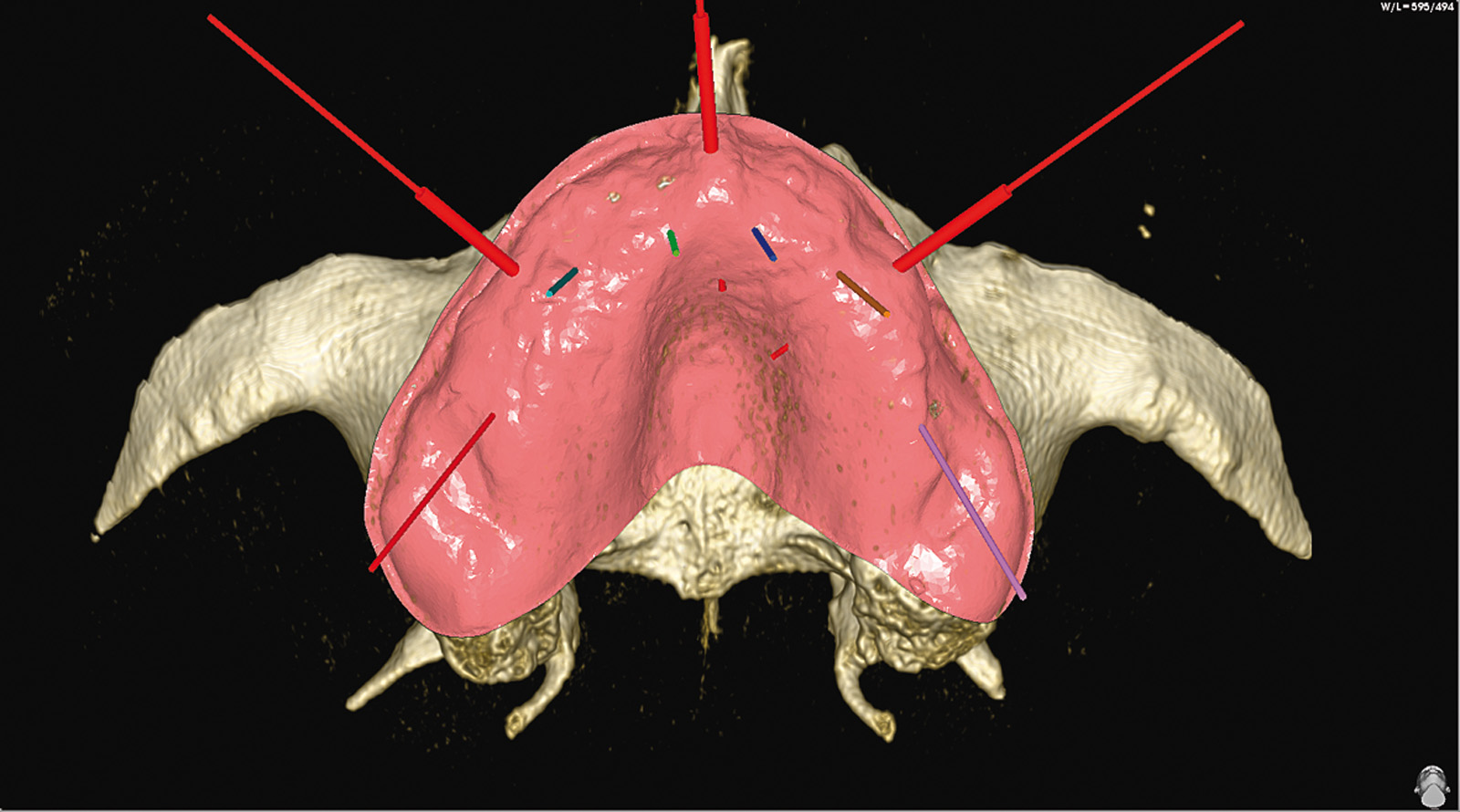
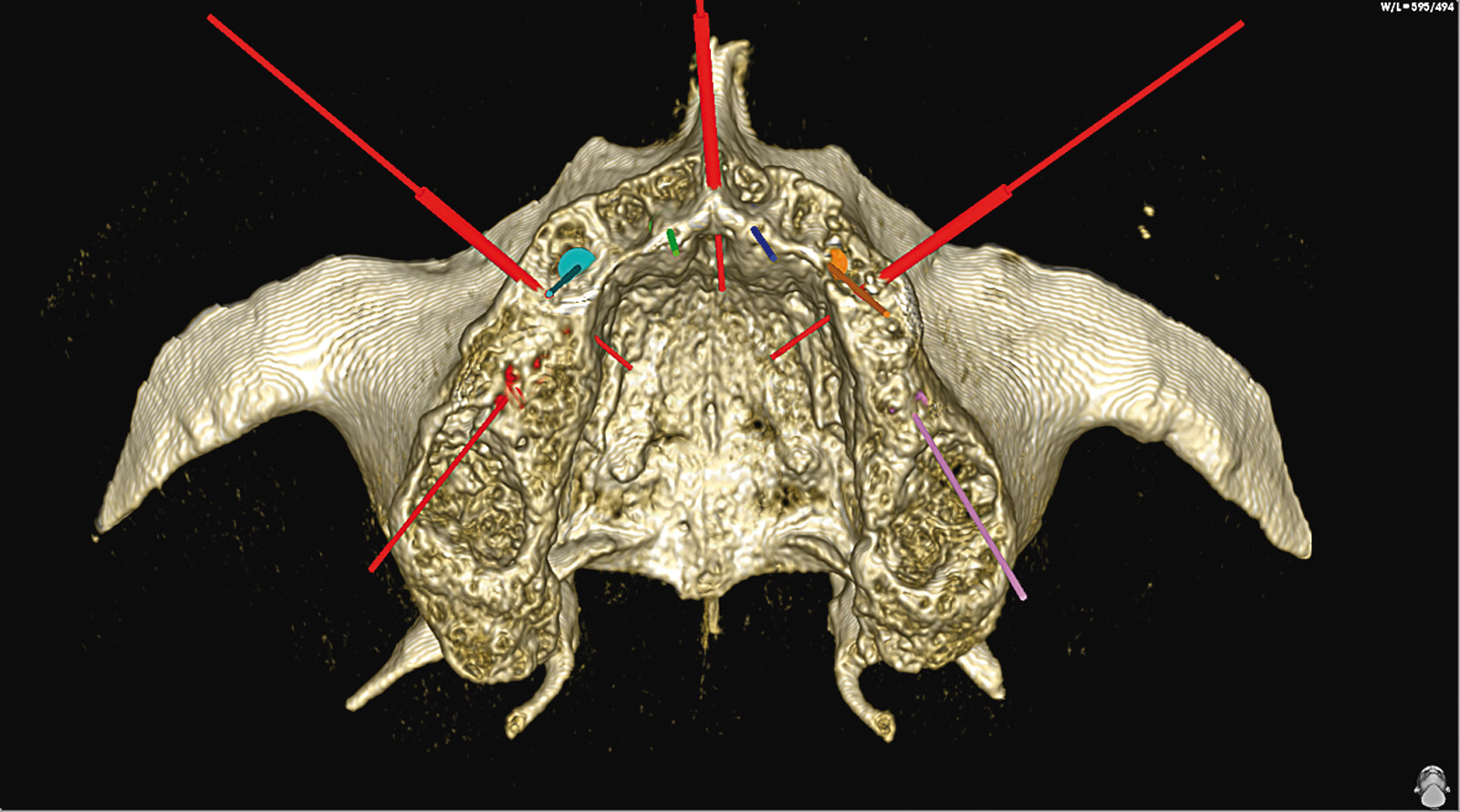
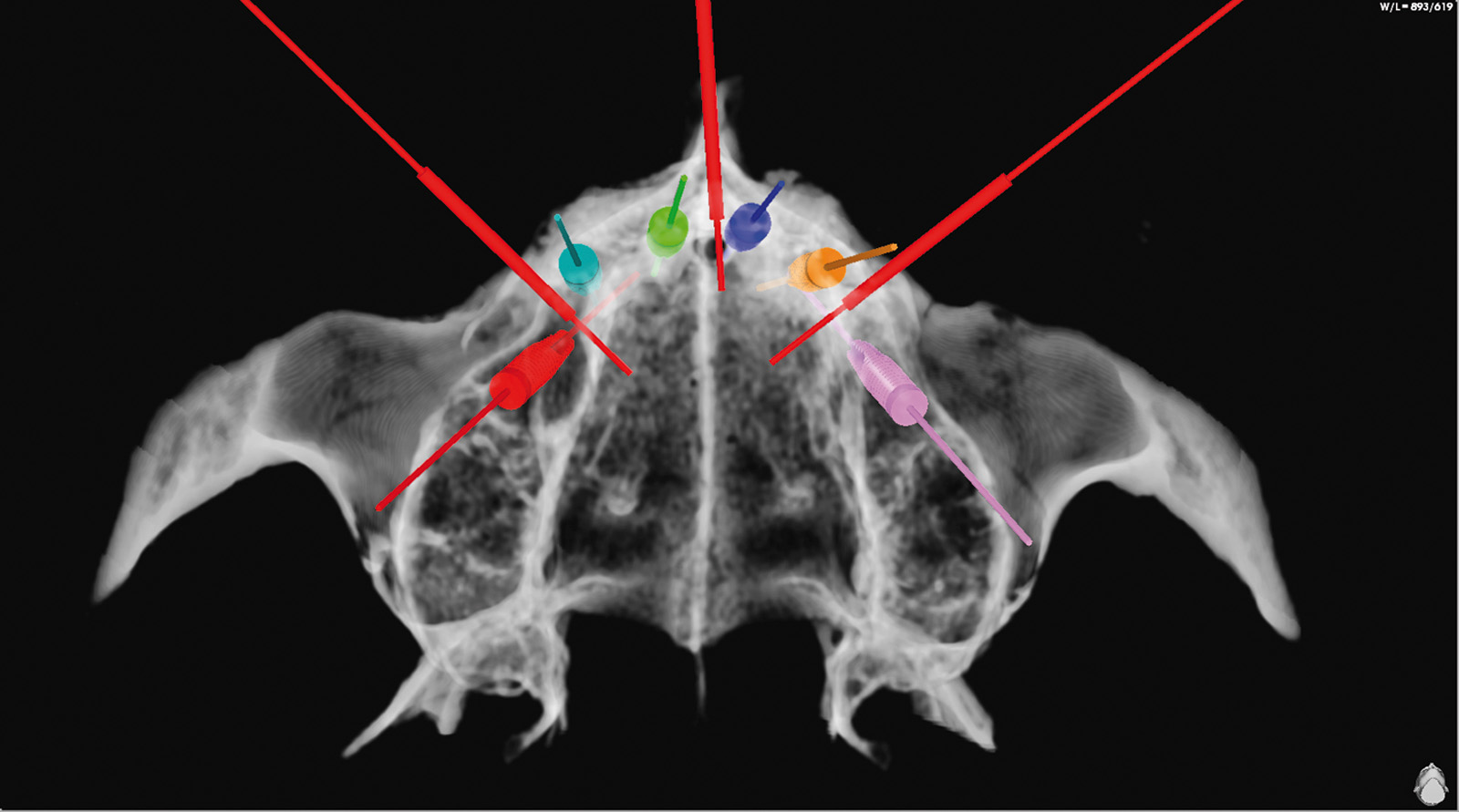
Si procede quindi con la fase diagnostica e di pianificazione implantare avendo a disposizione le informazioni relative al tessuto osseo (da CT/CBCT), dei tessuti molli (da scansione del modello in gesso) e della ceratura diagnostica (da scansione della dima radiologica) (Figure 1-4).
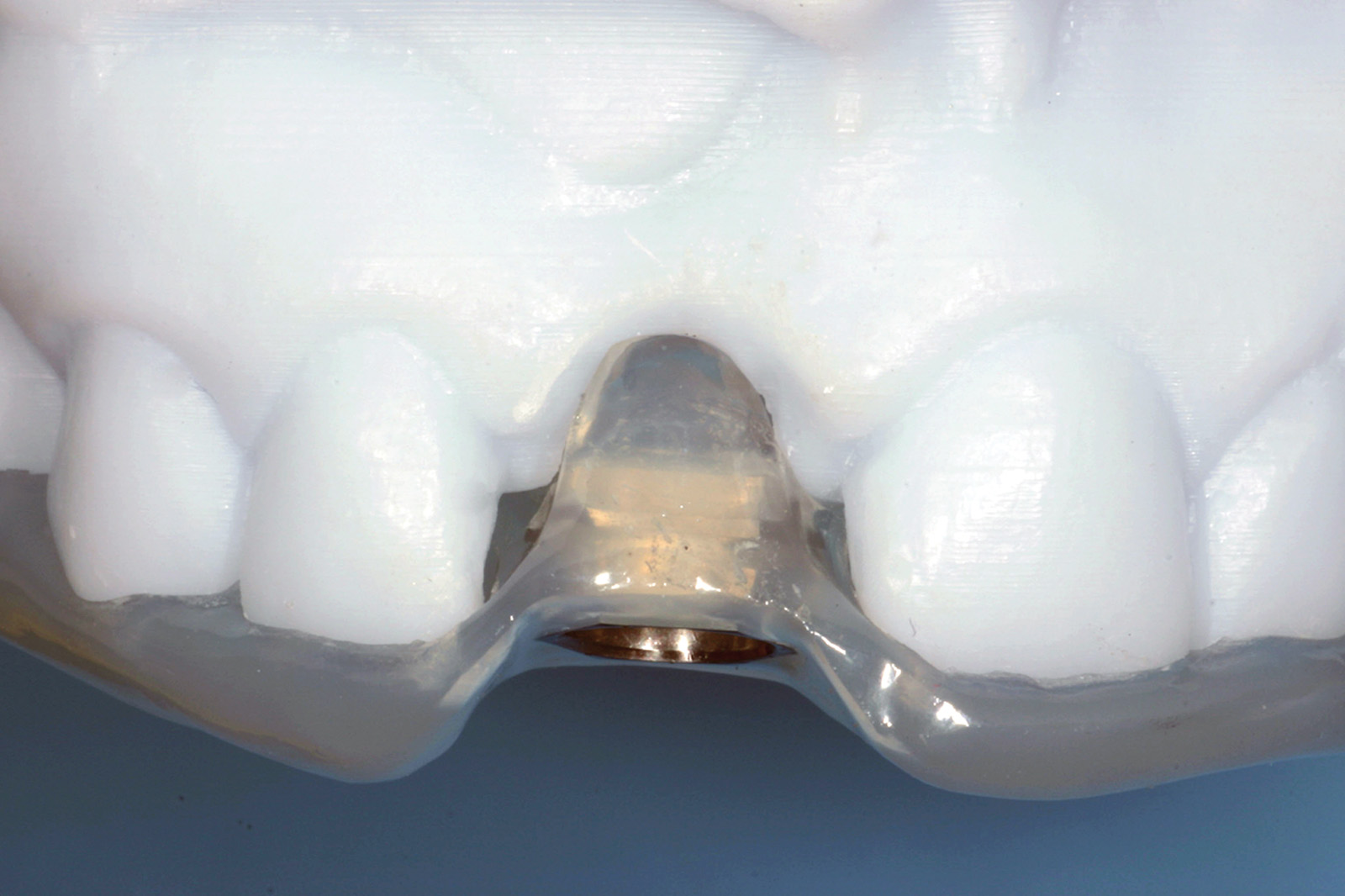
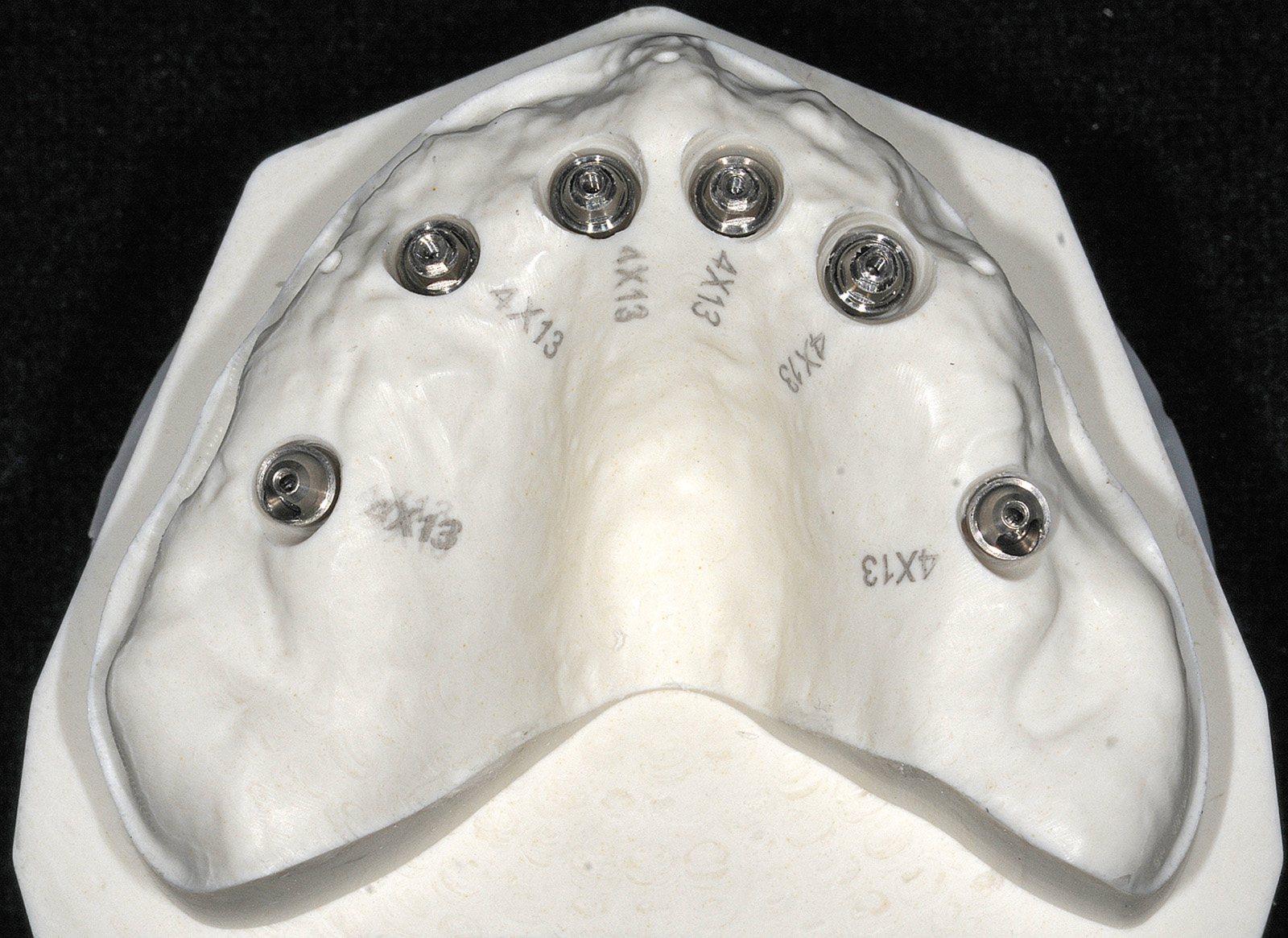
Realizzazione modello RealMODEL
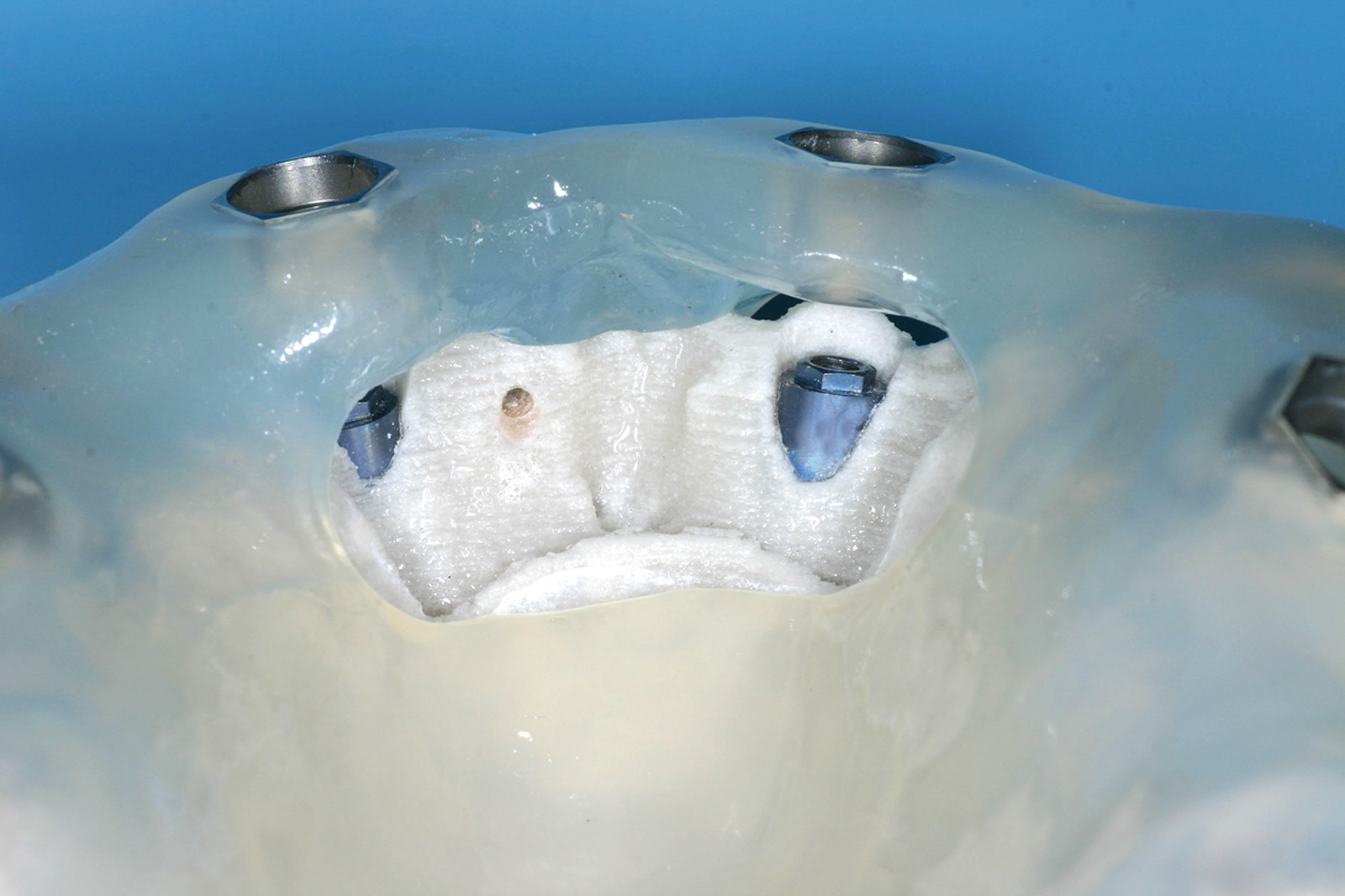
I file del modello da impronta e degli impianti virtuali sono utilizzati per generare il modello di lavoro RealMODEL che restituisce con precisione la morfologia dei tessuti molli del paziente con aggiunta dei fori calibrati per gli analoghi degli impianti nella posizione pianificata virtualmente. Il modello viene realizzato in fresatura a 5 assi o in prototipazione rapida ad alta definizione a seconda delle caratteristiche morfologiche (la presenza dei sottosquadri tipici del tessuto osseo non sono replicabili con tecniche CAD/CAM, ma sono ben riproducibili mediante prototipazione rapida, nel caso fosse necessario includerli nel modello). Le elevate precisioni ottenibili con entrambe le tecniche e, in particolare, la ridotta e predicibile tolleranza di lavorazione sui fori di alloggiamento degli analoghi ne consentono l’inserimento in modo assolutamente passivo e indipendente dalla mano dell’odontotecnico. L’opportunità di personalizzare il modello di lavoro consente, in caso di necessità, di costruire dime chirurgiche ad appoggio misto e visualizzare contemporaneamente la cresta ossea in corrispondenza degli impianti e i tessuti molli nelle zone non interessate dall’atto chirurgico.
Dima chirurgica
A partire dai modelli di lavoro RealMODEL è possibile realizzare qualsiasi tipo di guida chirurgica inserendo passivamente gli analoghi nel modello e utilizzando componentistica da laboratorio che vincola il lavoro dell’odontotecnico e ne preclude qualsiasi errore. Per posizionare la dima in modo univoco in fase chirurgica, nel caso di interventi flapless su pazienti totalmente edentuli, si realizza una chiave occlusale in silicone da rimuovere una volta bloccata la guida in bocca con viti da osteosintesi o perni di fissaggio.
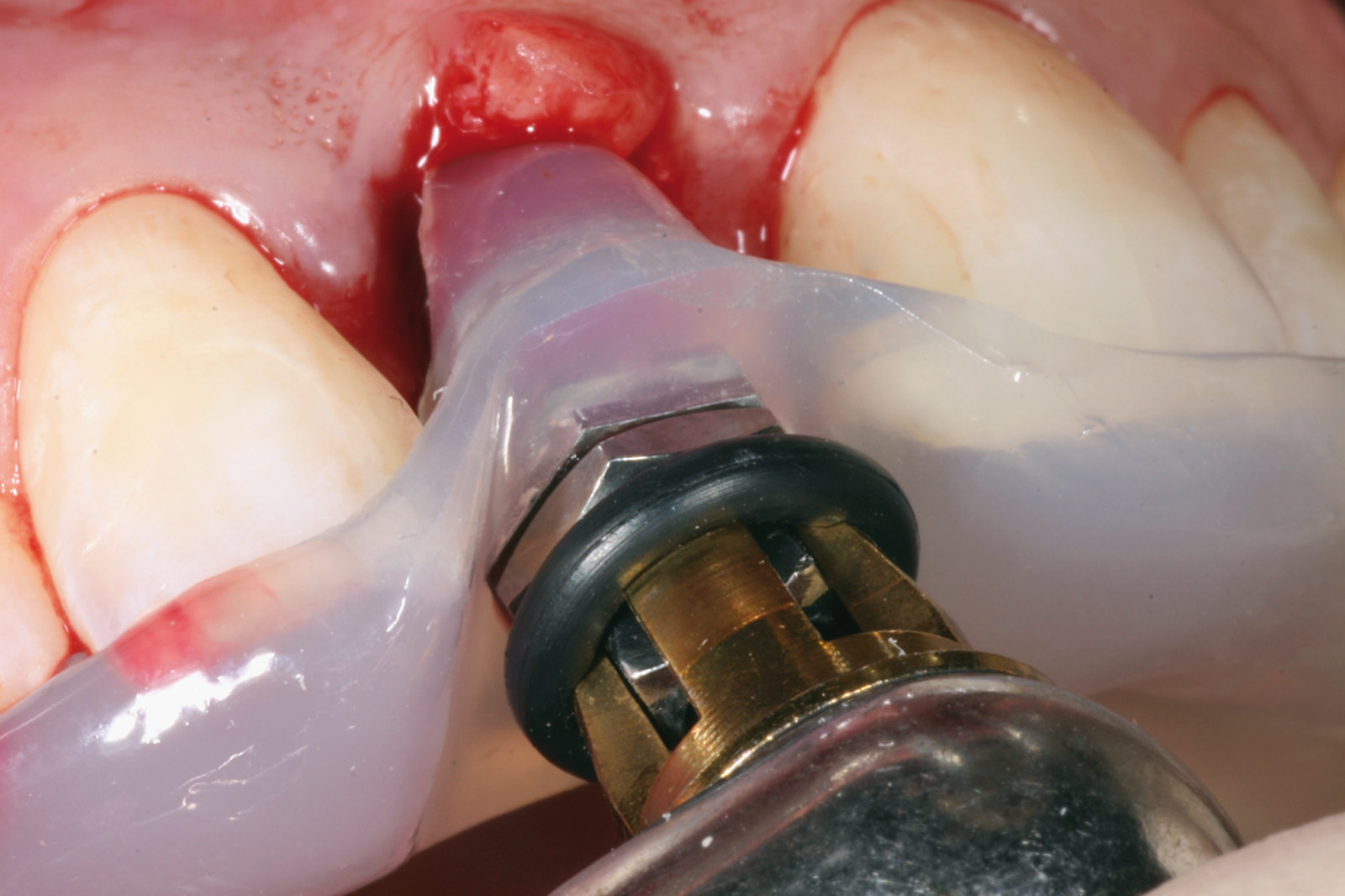
Chirurgia
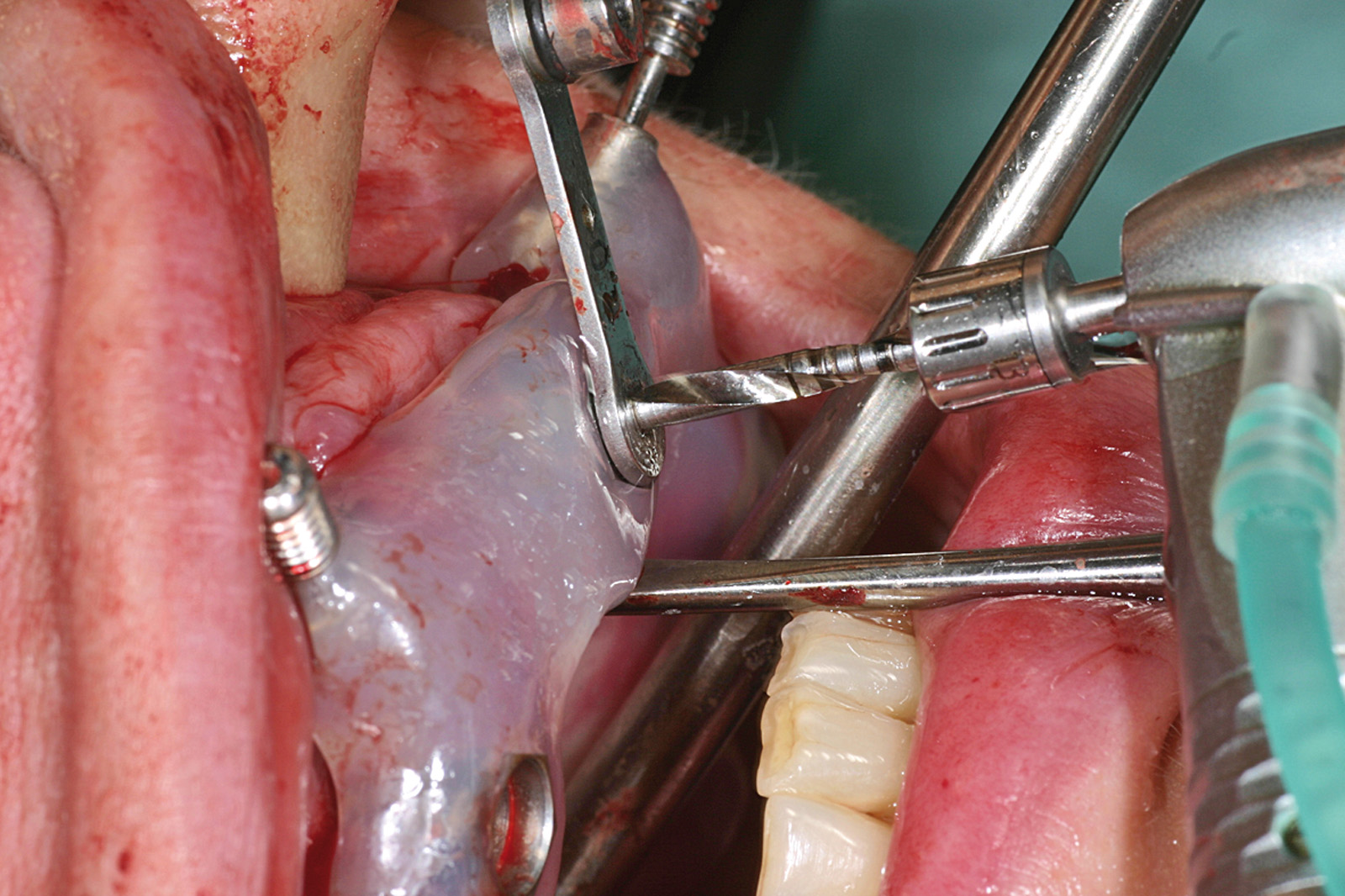
L’intervento viene eseguito mediante l’utilizzo di strumenti dedicati alla preparazione del sito implantare e alla guida dell’impianto attraverso la dima chirurgica. Per le varie fasi dell’intervento guidato si rimanda ai casi clinici illustrati di seguito.

Casi clinici
Riabilitazione totale a carico immediato tipo Toronto avvitata su 4 impianti
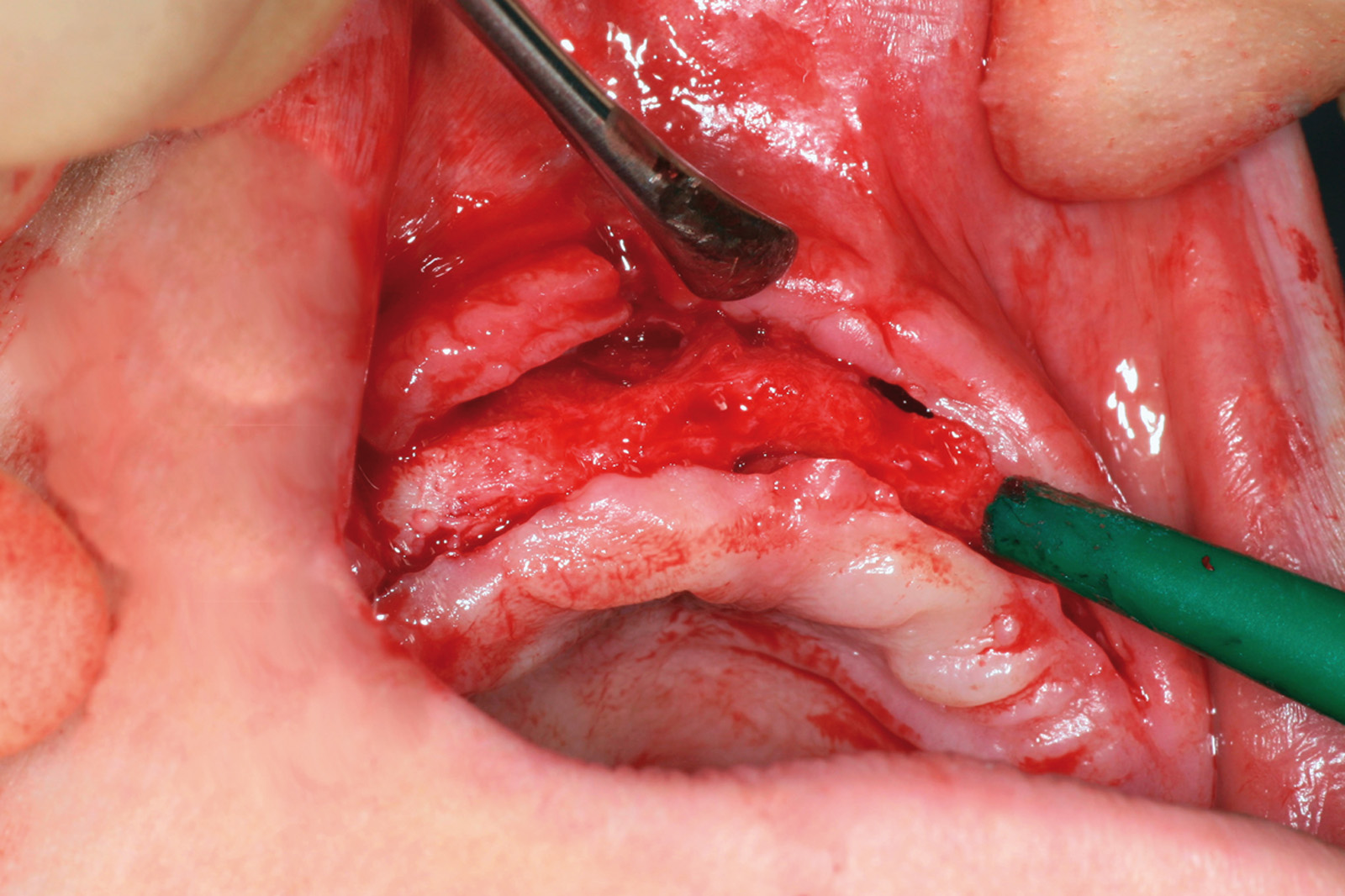
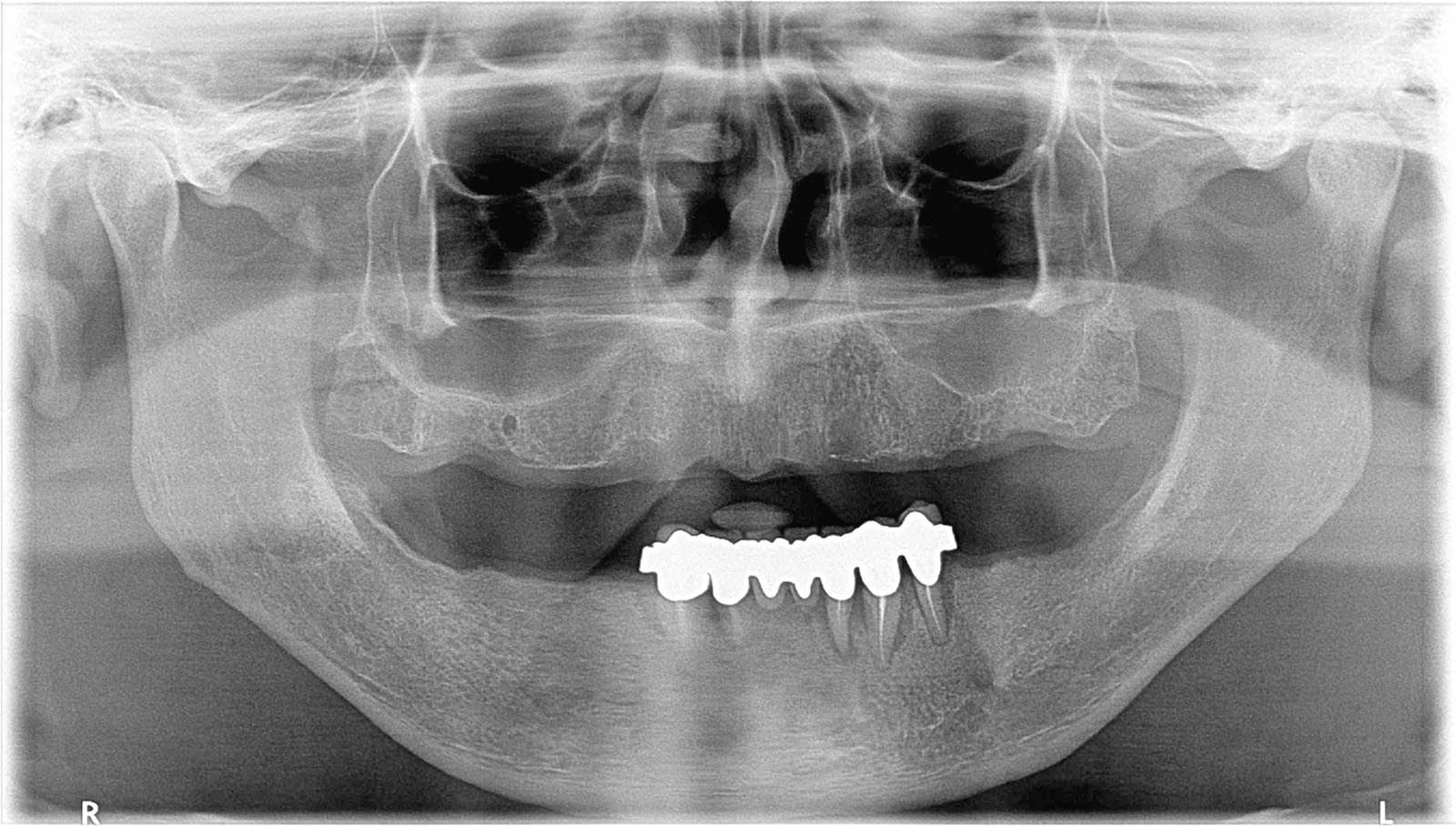
Anamnesi: paziente donna di 53 anni, nessuna controindicazione alla terapia implanto-protesica. Sono presenti i denti da 13 a 23, parodontalmente ed endodonticamente compromessi. Si programma una riabilitazione a carico immediato tipo Toronto, avvitata su 4 impianti (Osseotite, Biomet 3i) di cui i due distali posizionati inclinati di 30°, evitando così l’invasione dei seni mascellari. In un secondo tempo verrà poi riabilitata l’arcata inferiore (Figure 5-28). Chirurgia: Dott. F. Radogna; Laboratorio: Odt. M. Aguzzi.
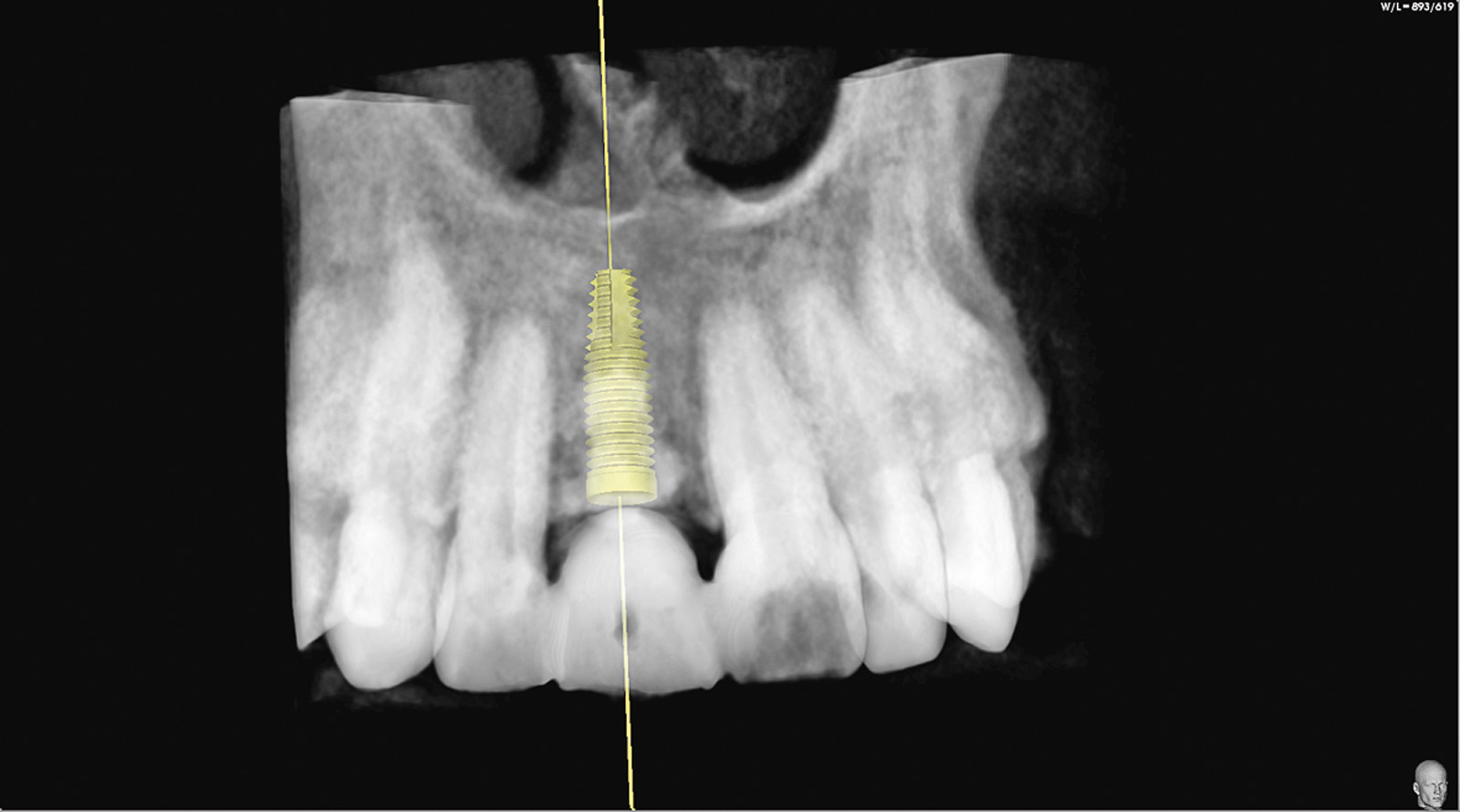
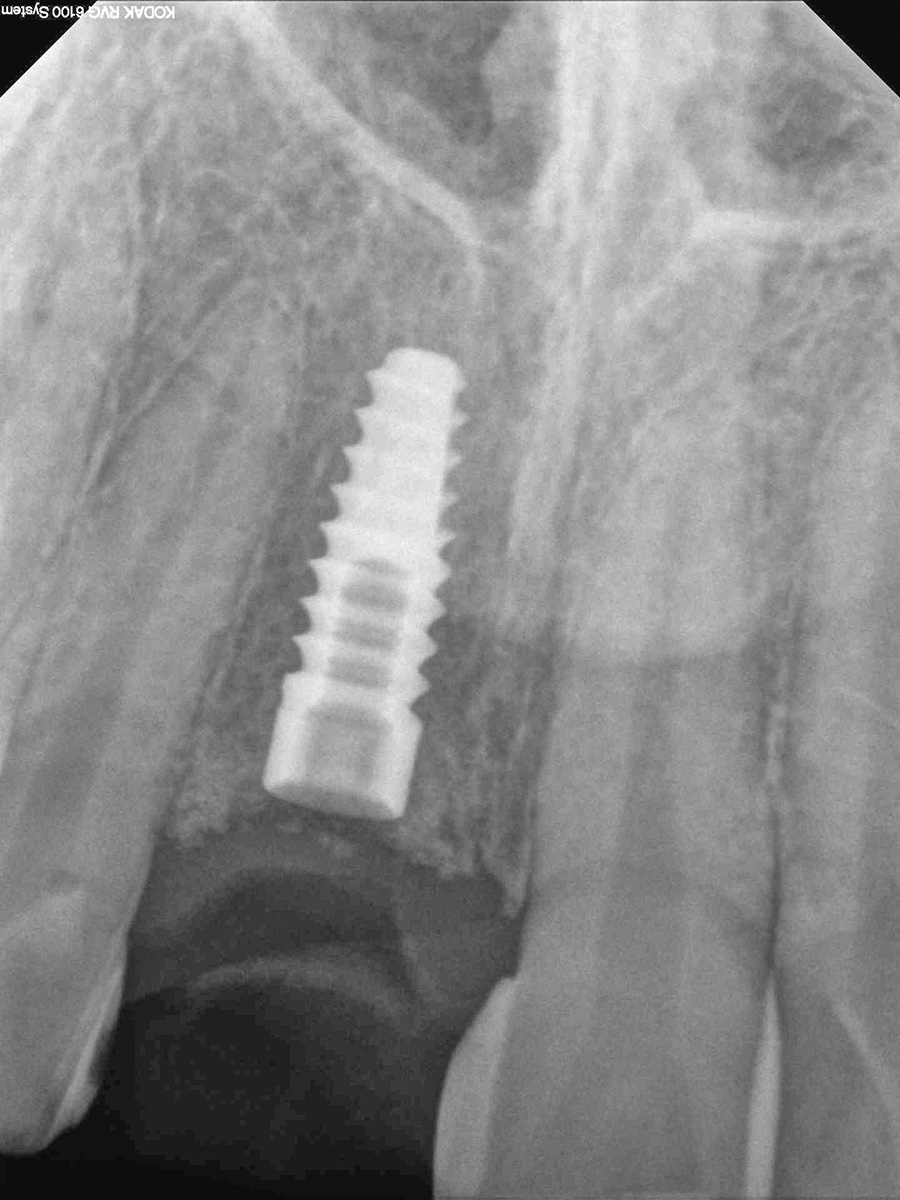
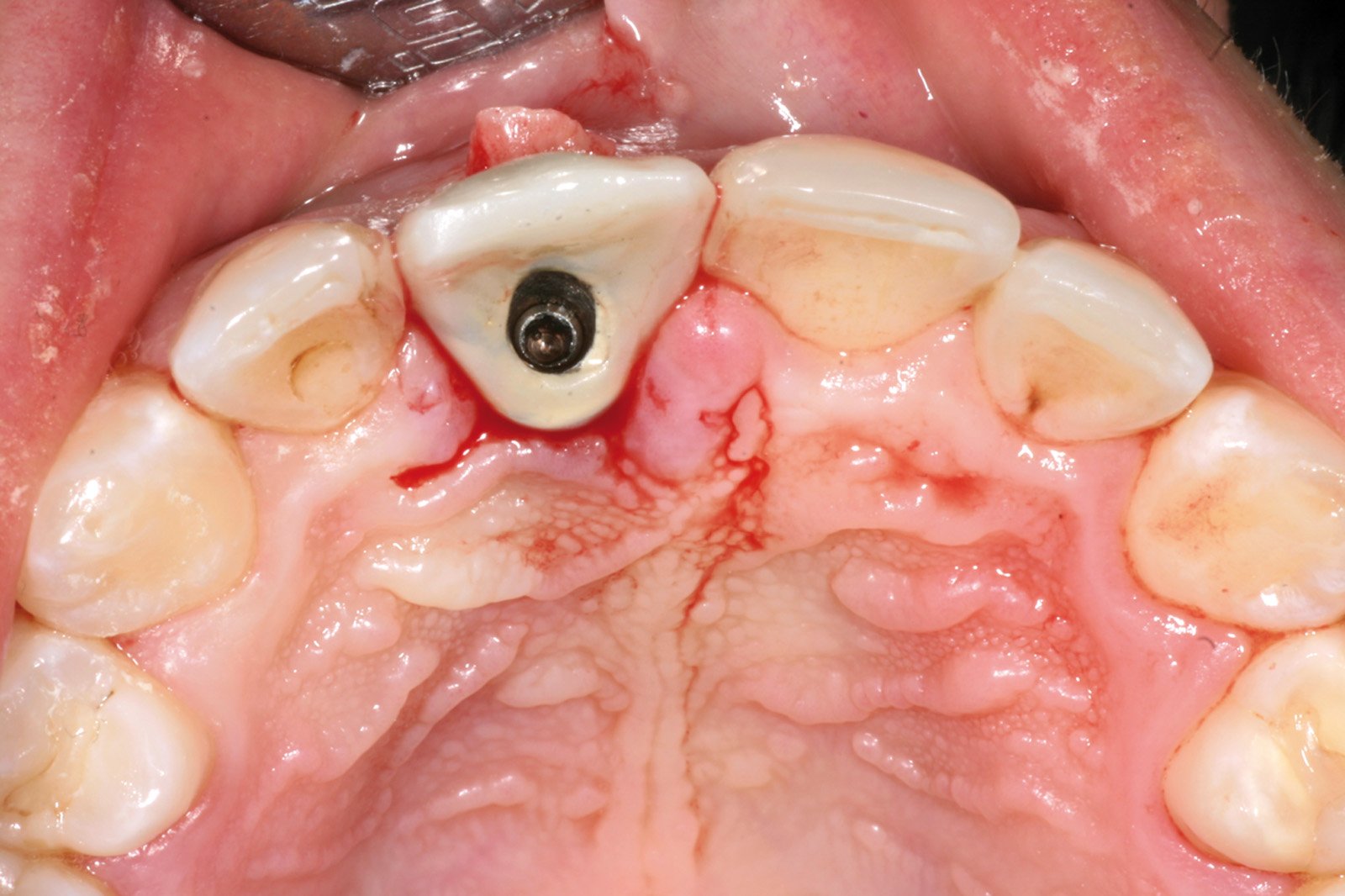
Riabilitazione in zona estetica: perdita per trauma
dell’elemento 1.1
Anamnesi: paziente donna di anni 27 con mancanza del dente 11 dovuta a trauma; dopo aver eseguito la rigenerazione dei tessuti duri e molli e splintato il dente naturale, si decide l’inserimento di un impianto (BioHorizons) (Figure 29-47). Chirurgia: Dott. A. Giorgis; Laboratorio: Odt. M. Aguzzi.
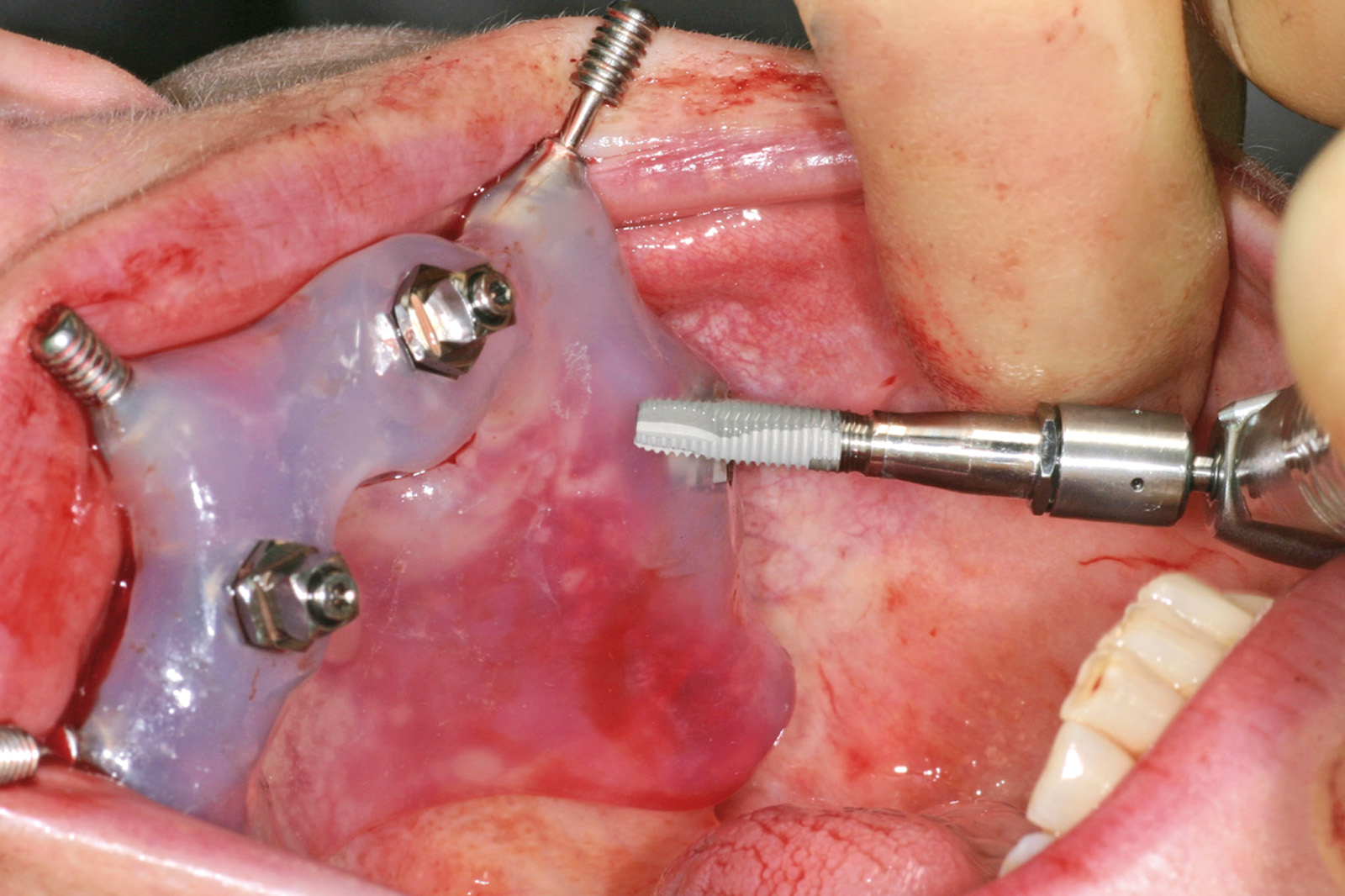
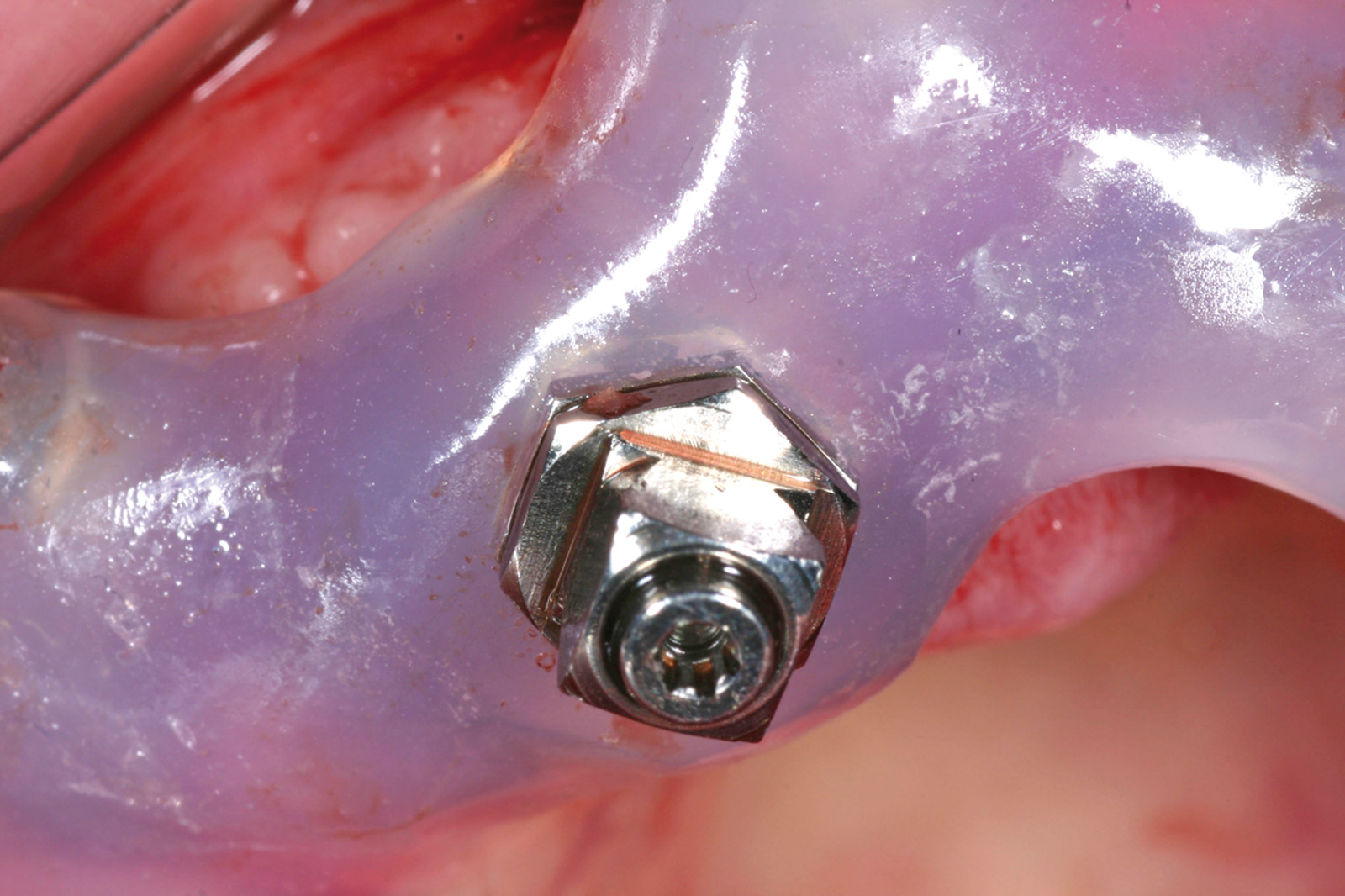
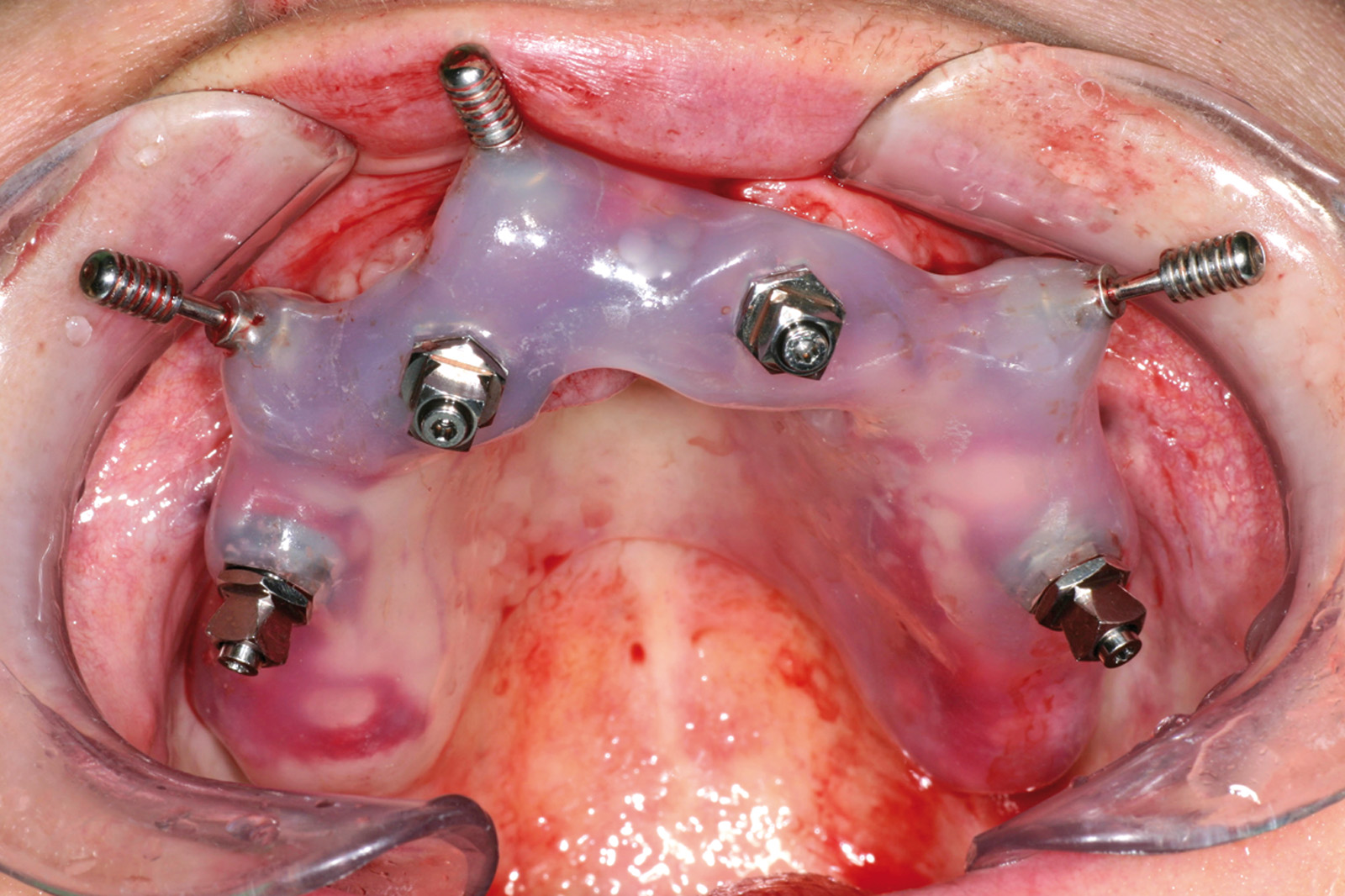
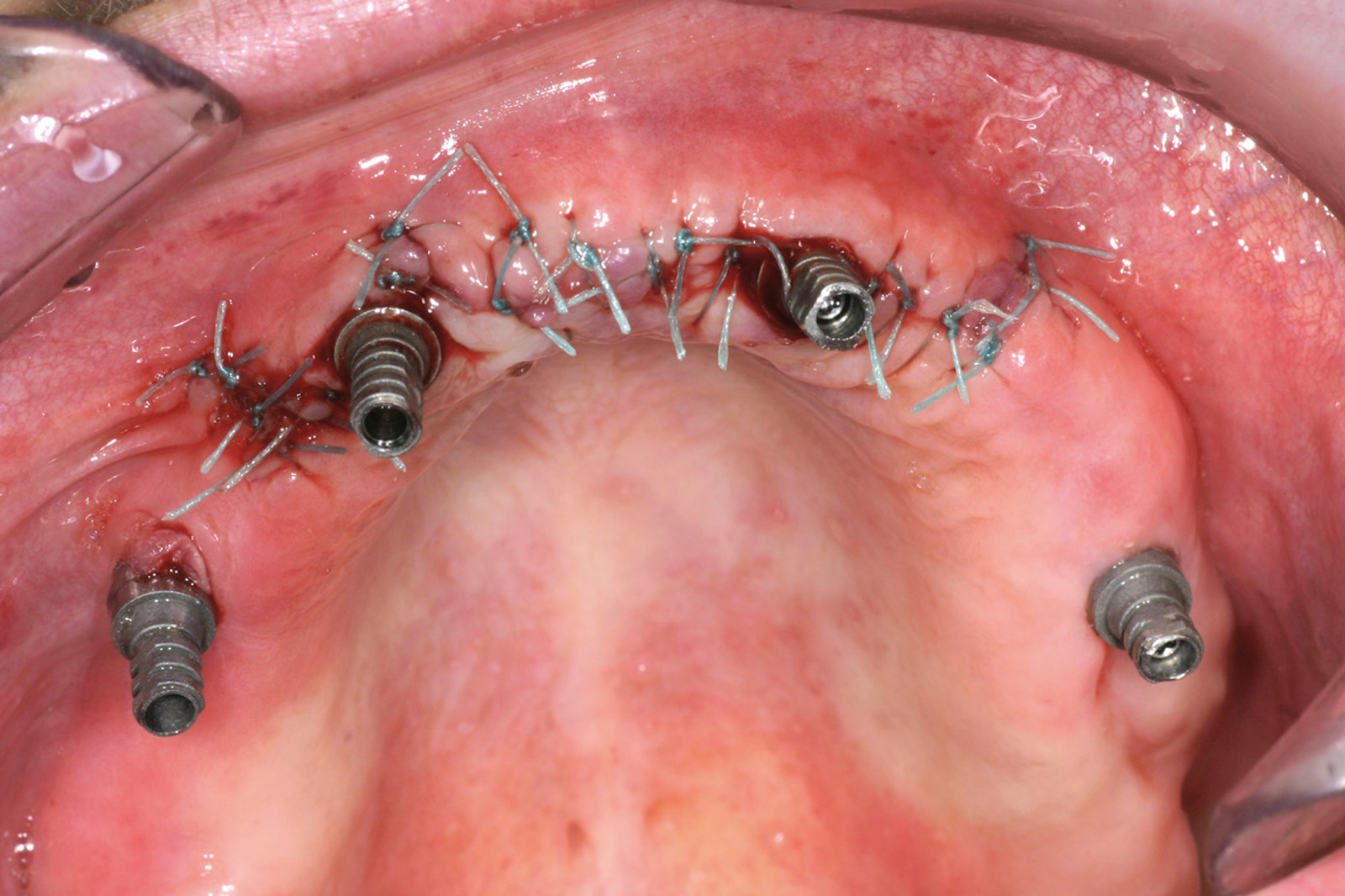
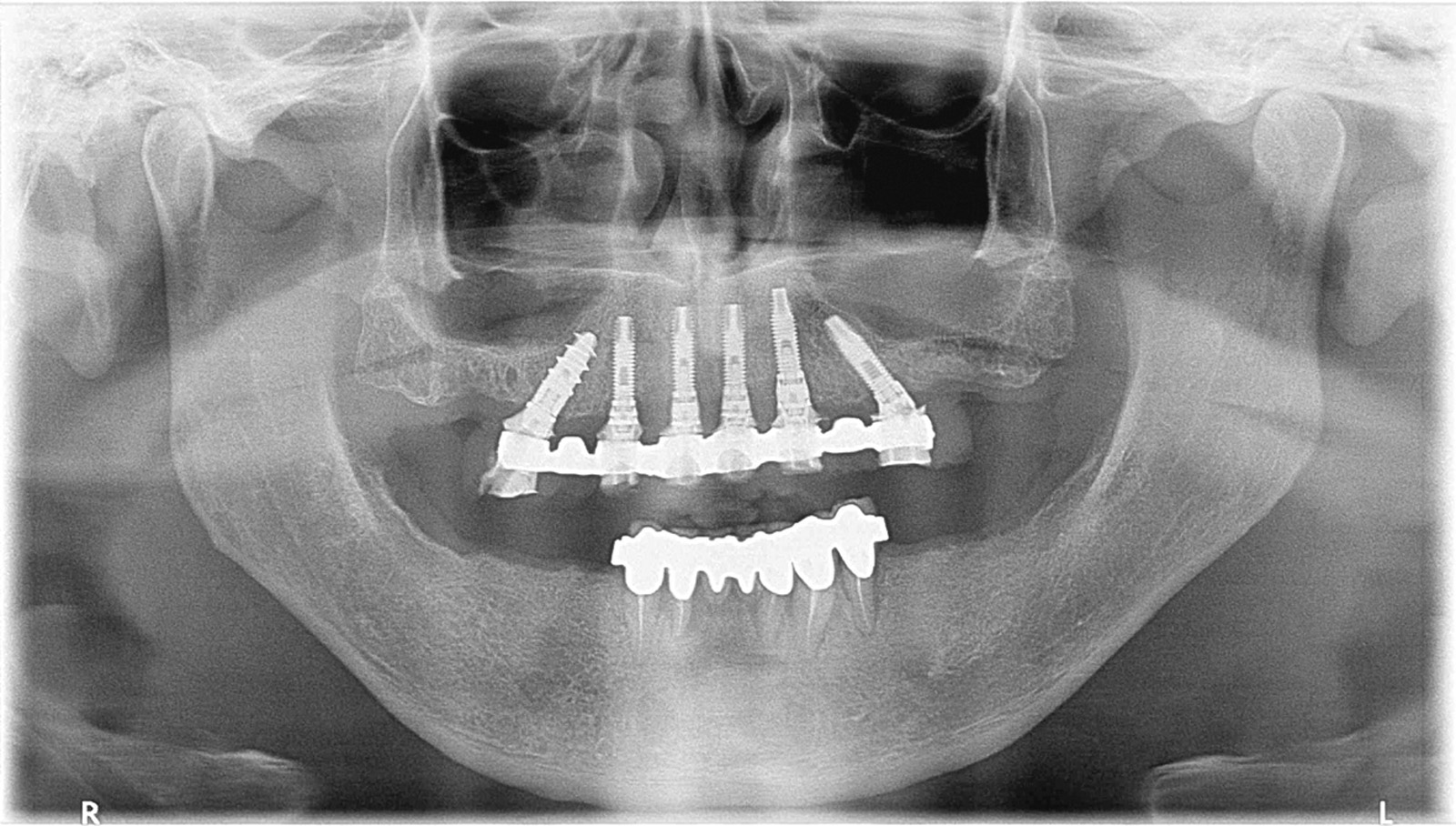
Riabilitazione totale a carico immediato tipo Toronto avvitata su 6 impianti
Anamnesi: paziente uomo di 56 anni, nessuna controindicazione alla terapia implanto-protesica. Sono presenti i denti da 13 a 23, 17 e 27 parodontalmente ed endodonticamente compromessi. Si programma una riabilitazione a carico immediato tipo Toronto, avvitata su 6 impianti (Southern Implant), con i due distali inclinati di 30°, evitando così l’invasione dei seni mascellari (Figure 48-67). Chirurgia: Dott. M. Carella; Laboratorio: A. Meoli, M. Robba.
Osservazioni e conclusioni
Come si evince dai casi clinici riportati la procedura di chirurgia guidata comporta due tipi di vantaggi:
- di ordine clinico. La percezione di questo vantaggio può essere rilevata sia dal medico che dal paziente. Dal punto di vista del clinico l’analisi (2D/3D) dell’esame consente di studiare il caso chirurgico in modo preciso prima che il paziente si sieda sulla poltrona, con la conseguente riduzione dei rischi operatori in quanto le eventuali deviazioni anatomiche o condizioni patologiche possono essere visualizzate in anticipo1. Dal punto di vista del paziente, invece, il percorso complessivo si traduce in una riduzione dell’invasività dell’intervento (in caso di interventi flapless, dove è possibile) e dei tempi operatori, in un minore trauma post-intervento e, nel caso di chirurgia a carico immediato, in una riduzione del numero di appuntamenti post-chirurgia (vantaggio condiviso anche con il clinico);
- di ordine protesico. Costituisce forse l’aspetto più importante, soprattutto per odontoiatri di una certa esperienza. La pianificazione computer-assistita consente infatti di ottimizzare il posizionamento degli impianti in funzione di una riabilitazione protesica adeguata al recupero funzionale del paziente. Tale pianificazione permette la realizzazione preventiva di una protesi provvisoria che viene montata nella fase post-intervento, consentendo un carico immediato ove possibile.
È importante sottolineare che per eseguire un intervento di chirurgia guidata con risultati predicibili è necessario tenere in considerazione alcuni fattori, qui di seguito riportati, che influenzano la precisione del sistema.




La qualità delle immagini TC/CBCT di partenza
Se il paziente si è mosso durante l’acquisizione, se il contrasto tra le strutture è troppo basso e se gli artefatti causati dalle corone metalliche eventualmente presenti in bocca coprono le strutture di interesse, allora si introducono delle imprecisioni difficilmente quantificabili in tutto il processo di pianificazione. Da questo punto di vista la sovrapposizione computer-assistita con la scansione ottica dei modelli consente di ovviare in modo particolarmente efficace a questi problemi, fornendo un modello di lavoro preciso e un appoggio per la guida chirurgica affidabile e indipendente dalla qualità delle immagini TC/CBCT.
La pianificazione virtuale
L’utilizzo delle tecnologie digitali richiede un certo grado di addestramento per “astrarre” le metodiche di chirurgia reale in una “virtuale”; è necessario infatti includere nella pianificazione degli accorgimenti particolari che non vengono solitamente presi in considerazione in una chirurgia tradizionale, quali:
- il posizionamento degli impianti deve tenere conto della presenza delle cannule guida delle frese che per esigenze costruttive devono essere a una certa distanza, generalmente superiore rispetto alla chirurgia tradizionale;
- in interventi di chirurgia completamente flapless la cresta ossea non è modificabile in fase intra-operatoria; di conseguenza, la testa dell’impianto deve essere posizionata in modo da non avere problemi di montaggio della protesi (impianto troppo affondato) né di esposizione delle spire (impianto troppo superficiale);
- dovendo utilizzare degli strumenti aggiuntivi rispetto alla chirurgia tradizionale (cannule guida e stop per frese che consentono la creazione del sito implantare come pianificato, sia in posizione che in altezza), è utile pianificare, ove possibile, il posizionamento di impianti con la medesima lunghezza e diametro, ottimizzando la gestione della strumentazione in fase operatoria.








Queste strategie sono facilmente adottabili nella gestione della diagnostica per immagini attraverso il software e possono essere implementate sui casi clinici individuali e tradotte in una guida chirurgica ottimizzata. Questa, in quanto progettata su un piano di trattamento individuale - sia a misura del clinico che gestisce l’intervento, sia in base alle caratteristiche anatomiche del paziente - deve essere considerata come un dispositivo medico su misura vero e proprio.
Il tipo di guida chirurgica
Questo aspetto ha notevole influenza sul grado di precisione dell’intero processo. Possiamo identificare i seguenti aspetti:
- tipo di appoggio. Le guide chirurgiche sono tipicamente ad appoggio osseo, dentale/misto o mucoso. La fase di collocamento della guida in bocca al paziente è sicuramente la più critica del processo, in quanto bisogna essere sicuri che essa sia nella stessa posizione in cui era la guida radiologica al momento della scansione TC. Nel caso di appoggio osseo è quindi necessario scollare il lembo in modo completo per assicurarsi che l’adesione tra la guida e la cresta ossea sia perfetta. Per chirurgia flapless, invece, il paziente deve essere riportato in occlusione con la guida inserita, e con interposizione di un bite (se presente durante l’acquisizione della TC) che garantisca la compressione uniforme dei tessuti molli e la stabilità della guida prima del fissaggio;
- tipo di fissaggio.
Le guide devono essere stabilizzate il più possibile prima di intervenire. I metodi più sicuri prevedono l’utilizzo di viti o perni di fissaggio endossei. In alternativa, se sono presenti alcuni elementi dentali si consiglia di utilizzarli sia come punto di ancoraggio che come punto di riferimento fisso che garantisce il corretto posizionamento della guida chirurgica.
È sconsigliato il solo mantenimento manuale della posizione della guida da parte dell’operatore; - materiali di costruzione. La guida deve essere costruita con materiali rigidi e resistenti alle sollecitazioni trasmesse dal movimento del manipolo durante i vari passaggi delle frese;
- personalizzazione. Come anticipato precedentemente, l’individualità del piano di trattamento deve necessariamente tradursi in un tipo di guida chirurgica ottimizzato per il caso specifico, aumentando così le probabilità di successo dell’intervento pianificato.
La fase chirurgica
La pianificazione virtuale si concretizza nella fase chirurgica; se tutti i passaggi precedenti sono stati correttamente seguiti, gli unici fattori che possono interferire con la precisione di posizionamento guidato
degli impianti sono le caratteristiche anatomiche individuali del paziente, quali:
- anatomia della cresta alveolare;
- caratteristiche e trofismo dei tessuti molli;
- grado di apertura della bocca.
Tali fattori sono rilevabili in anticipo grazie all’esame obbiettivo e all’indagine
radiologica preliminare, pertanto il giudizio clinico e l’esperienza dell’odontoiatra rivestono un ruolo dominante dall’inizio della procedura e ne determinano il successo fino alla fase conclusiva dell’intervento.
Corrispondenza
Dr. Alberto Giorgis
c/o dr.i Mario Mellano e Alberto Giorgis
Via San Giovanni Bosco, 9
12045 Fossano CN
albertogiorgis@hotmail.it
• Franco Radogna1
• Alberto Giorgis1
• Michele Carella1
• Marco Aguzzi2
• Antonio Meoli2
• Massimiliano Robba2
• Alessandro Motroni3
• Giacomo Moretti3
1 Odontoiatra
2 Odontotecnico
3 Ingegnere biomedico
1.Testori T, Galli F, Del Fabbro M. Il carico immediato, la nuova era dell’implantologia orale. Viterbo: Ed. ACME, 2009.
2. Schneider D, Marquardt P, Zwahlen M, Jung RE. A systematic review on the accuracy and the clinical outcome of computer guided template-based implant dentistry. Clin Oral Impl Res 2009;20(4):73-86.
3. Rosenfeld AL, Mandelaris GA, Tardieu BP. Prosthetically directed implant placement using computer software to insure precise placement and predictable prosthetic outcome. Part 1: diagnostics imaging, and collaborative accountability. Int J Period Rest Dent 2006;26(3):215-221.
4. Komiyama A, Klinge B, Hultin M. Treatment outcome of immediately loaded implants installed in edentulous jaws following computer-assisted virtual treatment planning and flapless surgery. Clin Oral Impl Res 2008;19:677-685.


: nuove features")



{kind=link}