

L’osteointegrazione di impianti dentali endossei è universalmente accettata dai clinici di tutto il mondo sulla base di una ricerca pre-clinica e clinica significativa. Attualmente si ritiene che sia altamente predicibile in diverse situazioni e che il successo dipenda da protocolli chirurgici e protesici corretti1-3. Un principio base per il successo del trattamento è che gli impianti siano inseriti nell’osso con un significativo contatto osso-impianto. La soddisfazione del paziente spesso dipende dai risultati estetici piacevoli, dalla funzione migliorata e dalla morbilità secondaria minima o nulla a qualunque trattamento chirurgico. Nei casi di volume osseo inadeguato per il posizionamento di impianti, la letteratura riporta notevoli risultati di successo dell’incremento del volume osseo con procedure osteogeniche che usano diversi principi biologici. Vi sono casi in cui il paziente preferisce evitare procedure chirurgiche invasive e traumatiche (innesto di osso), presenta un volume osseo minimamente accettabile per il posizionamento di impianti, ma comunque richiede il loro inserimento in posizioni precise per supportare una protesi. In questi casi, il clinico può necessitare di ulteriori studi diagnostici radiografici per valutare in modo preciso l’ottimale posizione tridimensionale prima della chirurgia implantare. La tomografia computerizzata (scansioni TC) è ampiamente disponibile per aiutare i professionisti nella pianificazione del trattamento implantare, fornendo immagini tridimensionali delle aree edentule. In modo specifico, la TC identifica le strutture anatomiche che possono essere di ostacolo al posizionamento di impianti, come il canale alveolare inferiore, il seno mascellare e le cavità nasali. Le TC sono utili anche dopo l’innesto osseo per valutare il successo o il fallimento delle procedure eseguite. Lo scopo di questo articolo è quello di presentare il trattamento di un paziente con chirurgia guidata mediante il Navigator System (Biomet 3i, Palm Beach Gardens, FL). Il Navigator System offre la chirurgia guidata per:
• angolazione ottimale dell’impianto al fine di assicurare risultati protesici ideali;
• orientamento dell’esagono implantare che diminuisce le complicanze cliniche e migliora la realizzazione di restauri fissi provvisori immediati;
• controllo della profondità implantare per una maggior sicurezza quando è necessario eseguire le osteotomie in prossimità di strutture anatomiche vitali;
• maggior possibilità per il clinico di sviluppare profili di emergenza ottimali durante l’osteointegrazione e/o la guarigione dei tessuti molli.
Il Navigator System viene utilizzato in combinazione con un software appropriato di pianificazione e con guide chirurgiche del singolo caso per ottenere i migliori risultati. Questa tecnologia fornisce un’opportunità per evitare gli ostacoli anatomici, determinare la precisa posizione degli impianti e, generalmente, permette di abbreviare i tempi del trattamento per un’efficienza clinica globale maggiore. In caso di procedure flapless, vi è anche una minor morbilità post-operatoria in quanto la pianificazione chirurgica del software fornisce informazioni specifiche per la preparazione precisa delle osteotomie e per il posizionamento di ciascun impianto.
PRESENTAZIONE DI UN CASO CLINICO
Il paziente era stato prima inviato a un chirurgo orale per un innesto osseo al fine di aumentare il volume osseo inadeguato che impediva il posizionamento degli impianti. Come sito donatore è stata scelta la cresta iliaca, ma questa procedura chirurgica aveva portato a un minimo incremento della quantità di osso disponibile. Invece di operare una seconda volta per incrementare il volume osseo prima dell’inserimento degli impianti, il clinico ha deciso di richiedere una TC per una valutazione più accurata. Prima della TC è stata realizzata una protesi in cera. In questo modo, i clinici coinvolti nelle procedure chirurgiche e protesiche erano consci di dove sarebbe stato necessario posizionare i denti artificiali al fine di ottenere un risultato estetico soddisfacente (figura 1). È stata quindi realizzata una protesi radiografica dal duplicato della protesi in cera da far indossare al paziente durante la scansione TC. Per la protesi definitiva si è optato per una Toronto. La TC scan/protesi radiografica facilitano notevolmente il piano di trattamento per quanto riguarda la determinazione del numero e della posizione degli impianti prima della chirurgia.

SEQUENZA CLINICA
Esame e diagnosi
Le decisioni sul trattamento devono essere il risultato di una valutazione clinica e radiografica completa accurata, con il colloquio del chirurgo e del protesista coinvolti nel trattamento con il paziente. Spesso in questi incontri è utile coinvolgere anche l’odontotecnico, soprattutto per quanto riguarda la realizzazione delle protesi in cera, di quelle per la scansione e dei restauri provvisori e definitivi. Le decisioni nella pianificazione del trattamento sono influenzate dagli aspetti economici, dalla durata del trattamento e dagli specifici design protesici legati ai risultati del trattamento. Dopo aver raggiunto una decisione, e con il paziente conscio dei vantaggi e dei limiti del trattamento proposto, inizia la fase di programmazione degli appuntamenti necessari.
Protesi in cera e protesi radiografica
È stata realizzata una protesi in cera per identificare la posizione corretta dei denti, il supporto labiale, la dimensione verticale occlusale e il display incisale mascellare durante la fonazione, il sorriso e a riposo. È stata realizzata una protesi radiografica con duplicazione della posizione dei denti, relativamente all’osso sottostante identificato dalla TC. I dati digitalizzati della TC sono stati convertiti nel software di pianificazione (SimPlant Planning Software, Materialise Dental Inc., Glen Burnie, MD). Il clinico ha pianificato virtualmente il caso in base alla dimensione e alle posizioni tridimensionali degli impianti, nonché identificando la lunghezza dei monconi necessari per la protesi definitiva. La pianificazione del caso chirurgico includeva anche le posizioni e le angolazioni necessarie per l’ottimale posizionamento degli impianti a seguito di limitazioni ossee. Gli impianti specifici devono essere selezionati dalla libreria virtuale tenendo in considerazione se la dimensione verticale o interarcata può accogliere la protesi.
Guida chirurgica generata al computer
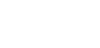
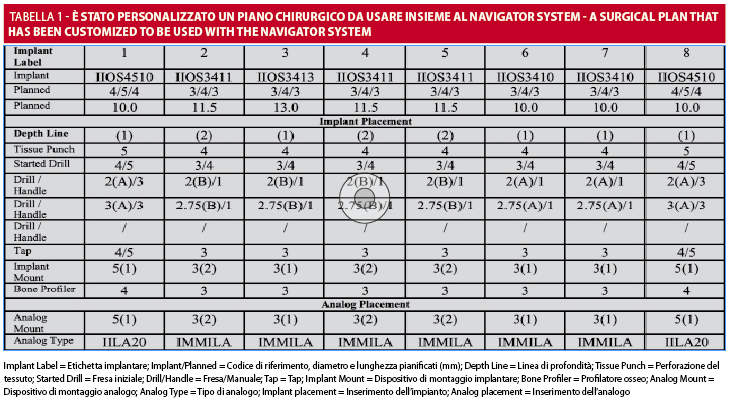
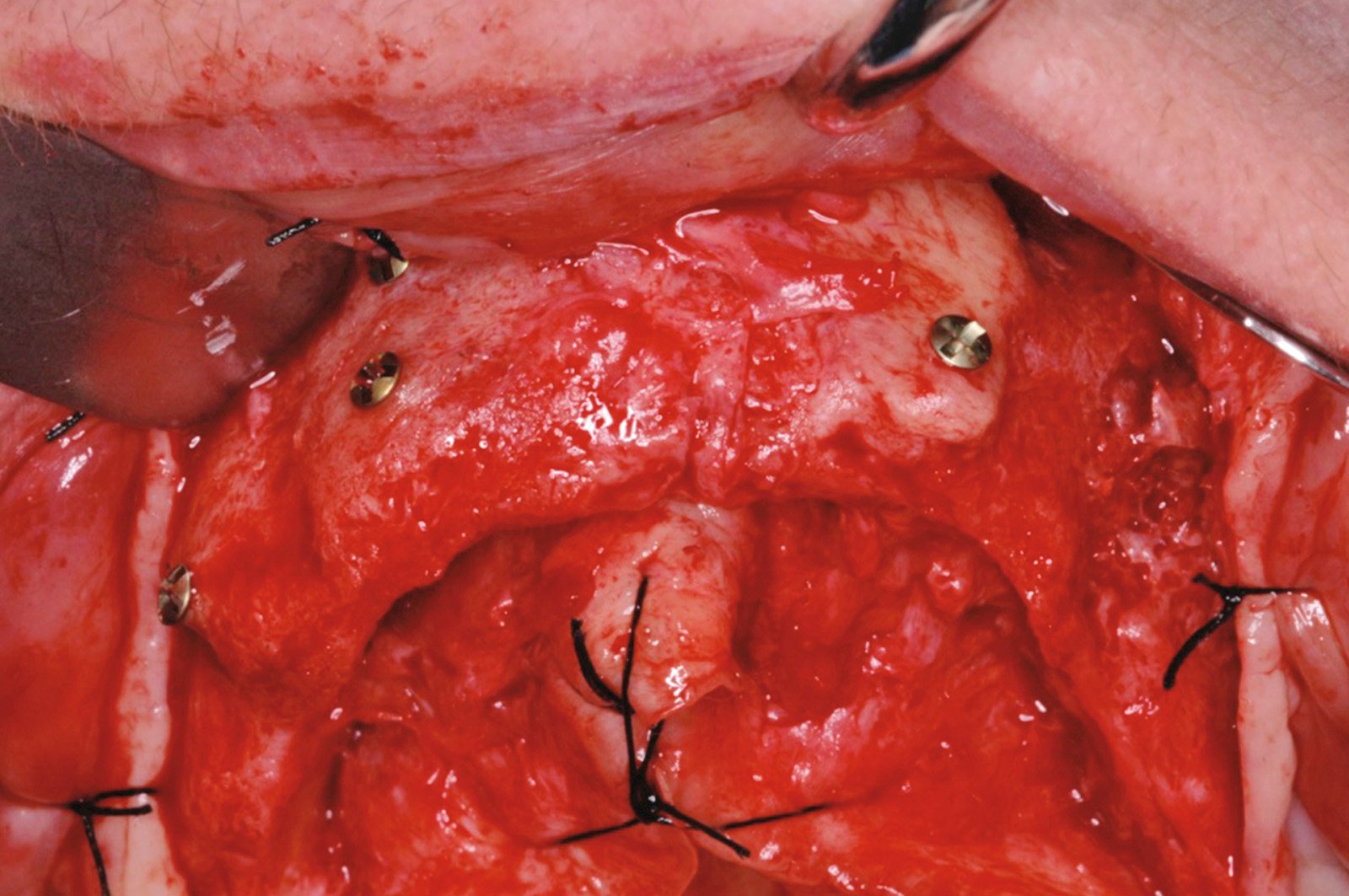
La pianificazione digitalizzata è stata inviata elettronicamente a Materialise per la realizzazione di una guida chirurgica specifica del caso e la pianificazione chirurgica per il protocollo specifico di fresatura (lunghezza e diametro di ciascuna fresa) (tabella 1). In caso di applicazione di una protesi provvisoria fissa supportata da impianti per l’uso con protocollo di carico occlusale immediato, questa sarebbe stata realizzata in laboratorio con Biomet 3i Navigator Laboratory Kit. La protesi provvisoria sarebbe stata realizzata usando i dati contenuti nel piano di trattamento chirurgico generato al computer e la parte protesica del Navigator Laboratory Kit per realizzare un modello master, il montaggio in articolatore e la protesi provvisoria per il posizionamento immediato dopo l’inserimento implantare. Materialise ha stampato il pianto di trattamento generato al computer e realizzato una guida chirurgica, sempre al computer, che sono poi stati inviati al chirurgo. Dato che il caso richiedeva un posizionamento degli impianti assolutamente preciso e accurato, la guida chirurgica è stata realizzata per adattarsi direttamente sull’arcata mascellare edentula, dopo scollamento dei tessuti molli (figure 2 e 3).
Il piano specificava esattamente lunghezza e diametro delle frese da usare in sequenza, attraverso i manicotti della guida chirurgica, dalla fresa iniziale fino al maschiatore. Il piano identificava gli stop di profondità predeterminati per le fresa a spirale e anche gli implant mount da utilizzare per ciascun impianto. I manicotti guida sono stati realizzati con piccolo intaglio sulle superfici occlusali, 180 gradi a parte. I manicotti master sono stati posizionati nella guida chirurgica dal produttore. Questo design permette al chirurgo di replicare le posizioni degli esagoni degli impianti stabilite nei modelli master. Questa caratteristica aumenta anche la precisione della protesi fissa provvisoria che può essere realizzata dalla guida chirurgica. Nel Navigator System Kit sono disponibili gli implant mount con diametro 3.4, 4 e 5 mm e in due lunghezze, con il risultato di sei possibili scelte di implant mount. Ve ne sono quattro di ciascuno; ciascun mount risulta in una specifica profondità per ciascuna fresa in quanto le flange lavorate della fresa impediscono il posizionamento in profondità oltre a quanto indicato dal piano di trattamento.
Chirurgia guidata al computer e posizionamento dell’impianto
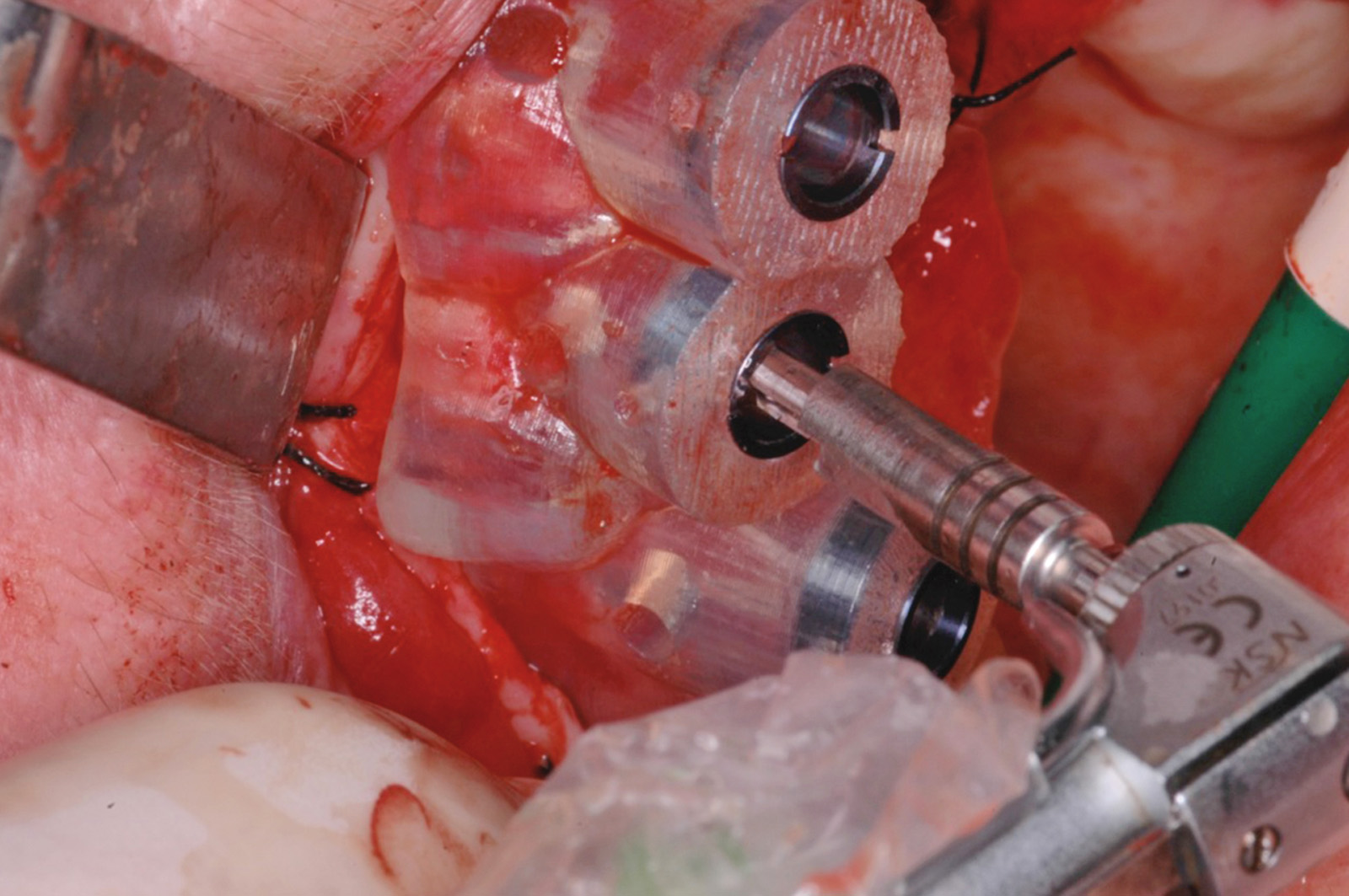
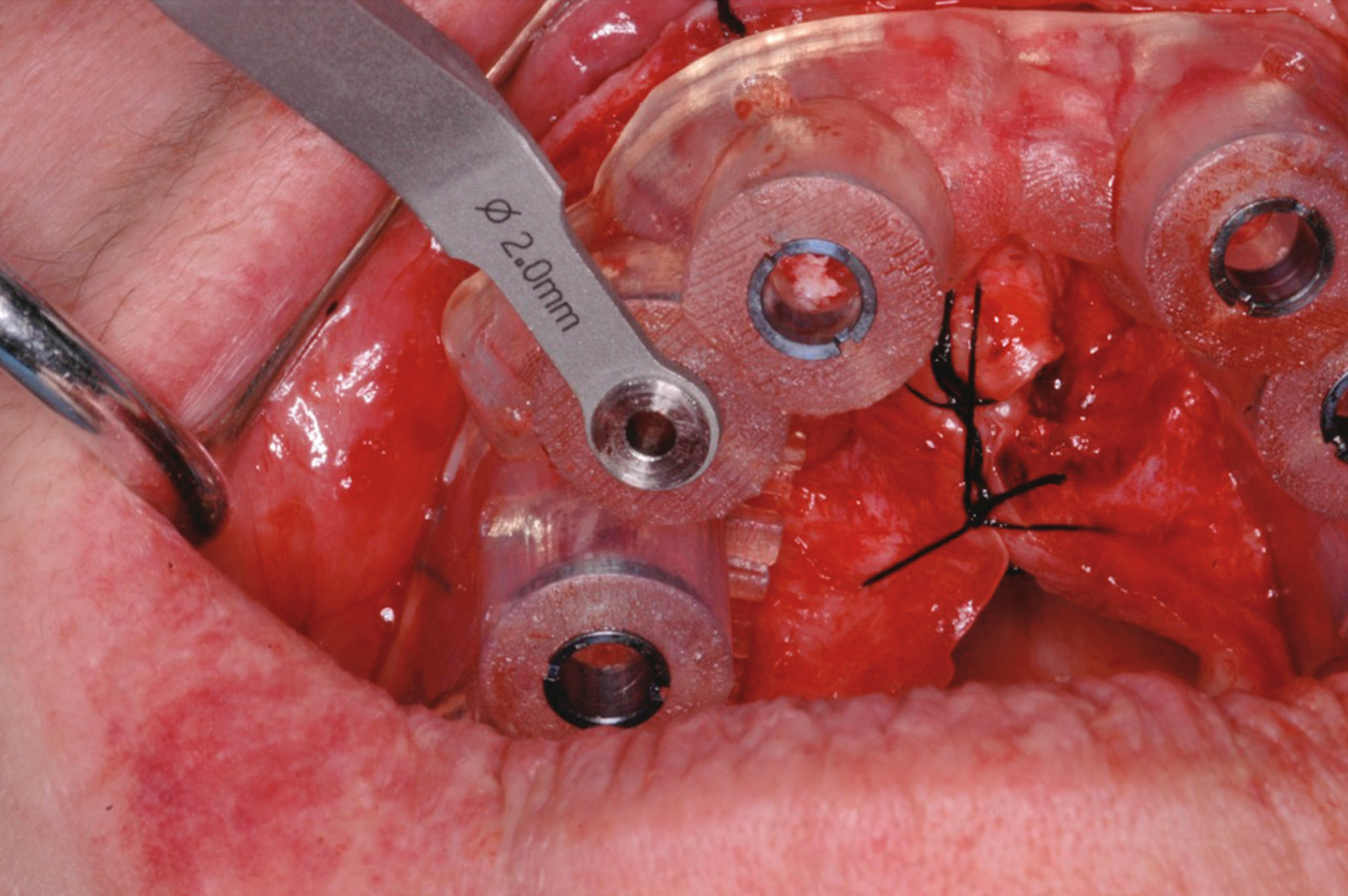
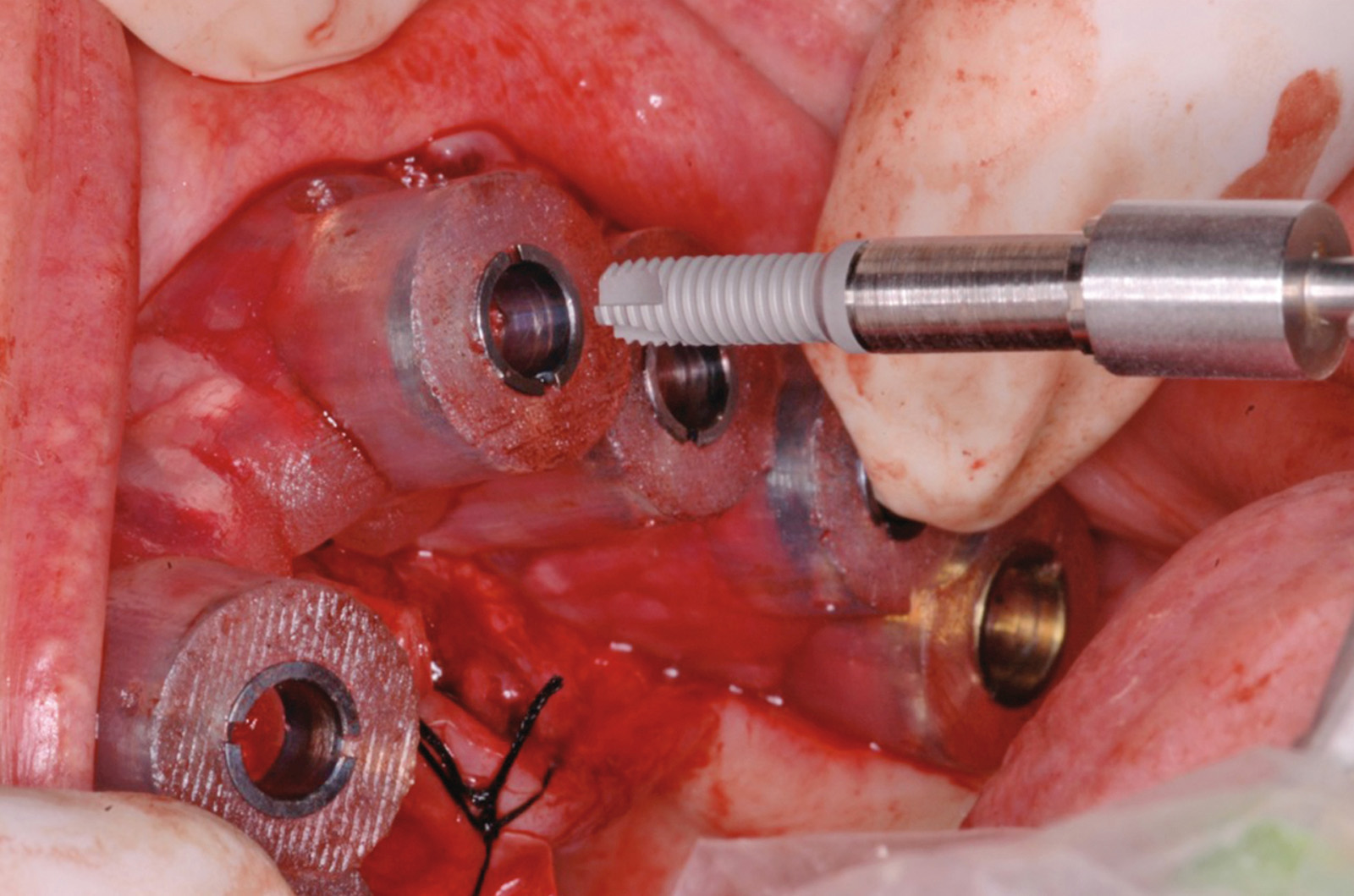
Il chirurgo ha rivisto il piano chirurgico e ha scelto la sequenza delle frese designate per creare ciascuna osteotomia per ogni sito implantare specifico. Le frese iniziali hanno preceduto quelle a spirale nello sviluppo delle osteotomie (figura 4). Le frese a spirale sono state usate con i supporti di posizionamento delle frese per mantenere la concentricità delle osteotomie per tutta la sequenza di fresatura (figura 5). I supporti di posizionamento delle frese sono stati inseriti nei manicotti master della guida chirurgica per il controllo della profondità e l’angolazione delle osteotomie. La velocità di fresatura raccomandata era di 800-1200 rpm (in base al diametro specifico della fresa e alla densità ossea). Se necessario, in osso denso è possibile utilizzare i maschiatori, con una velocità di15-20 rpm; in questo caso, i maschiatori non sono stati utilizzati in quanto l’osso mascellare è stato considerato essere di Tipo III. Una volta completate le osteotomie, sono stati selezionati gli implant mount specifici per gli impianti e i siti. Gli impianti sono stati inseriti precisamente alle profondità predeterminate (figura 6).
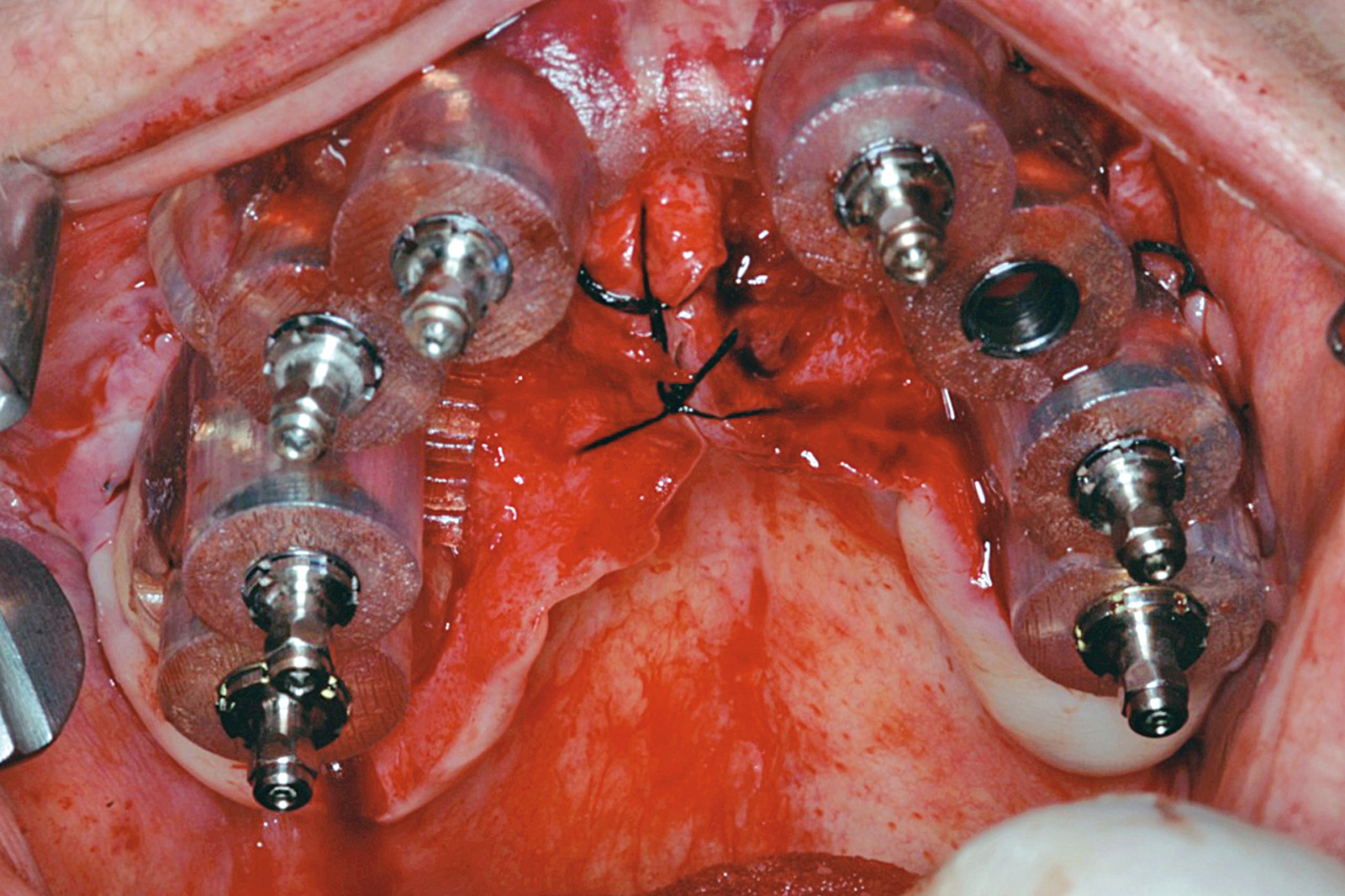
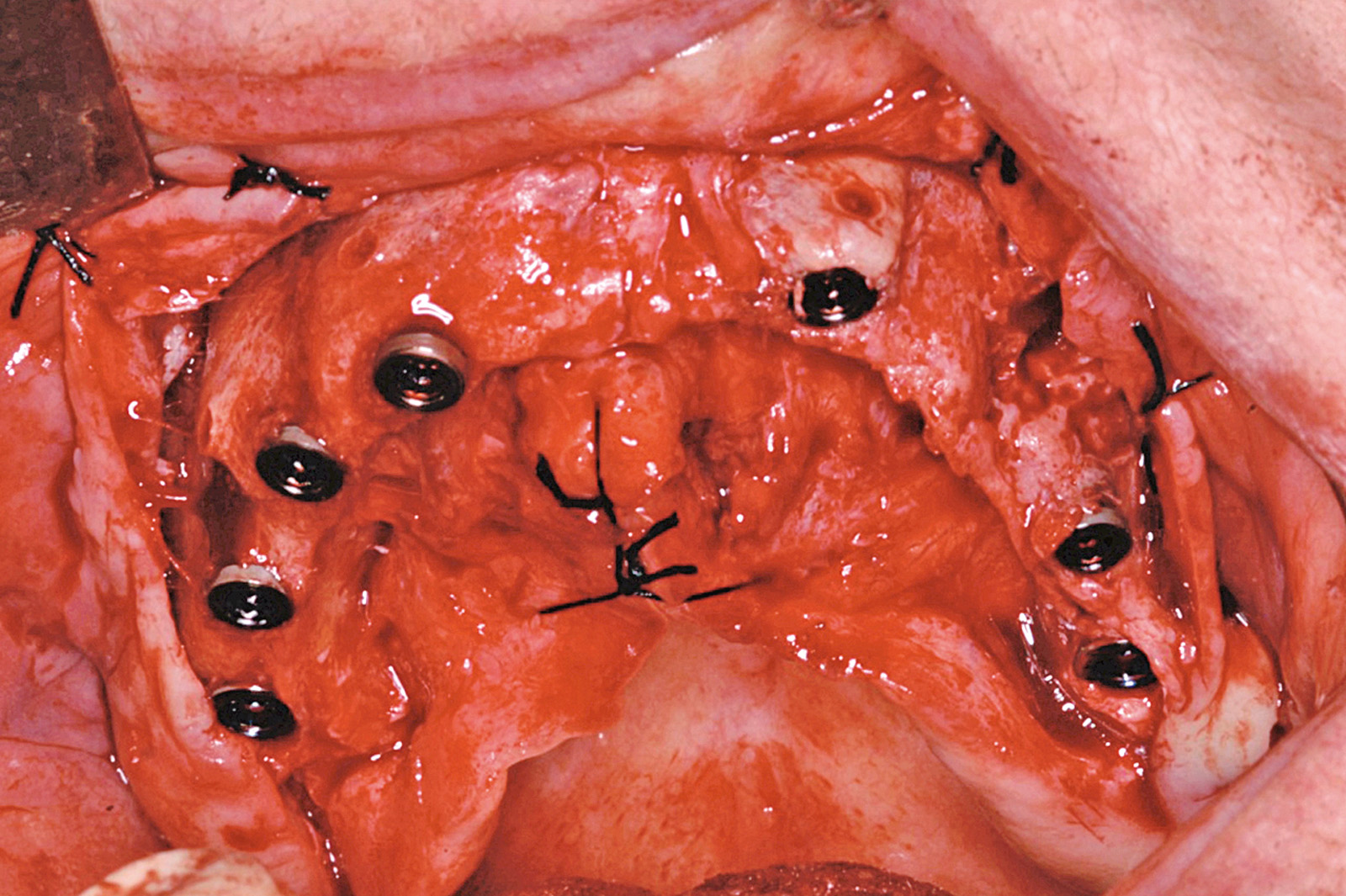
È opinione degli Autori che l’inserimento degli impianti dovrebbe avvenire alternando il posizionamento nei lati destro e sinistro. Gli Autori ritengono che questo assicura che la guida chirurgica sia allineata correttamente durante tutta la procedura. Gli implant mount sono stati tolti dopo che gli impianti sono stati posizionati prima della rimozione della guida chirurgica (figure 7a e 7b). In questo caso, le viti di copertura sono state applicate sugli impianti e i lembi sono stati riposizionati. Qualora si fosse deciso di utilizzare una protesi provvisoria realizzata per il carico occlusale immediato, l’applicazione dovrebbe avvenire in questa fase. In alternativa, si può utilizzare un protocollo chirurgico a una o due fasi.
Follow-up post-operatorio
Il paziente è stato accuratamente monitorato durante la guarigione, i cui tempi variano da due a sei mesi in base alla qualità dell’osso, ai valori di torque di inserimento degli impianti e al giudizio del chirurgo.
Realizzazione della protesi definitiva
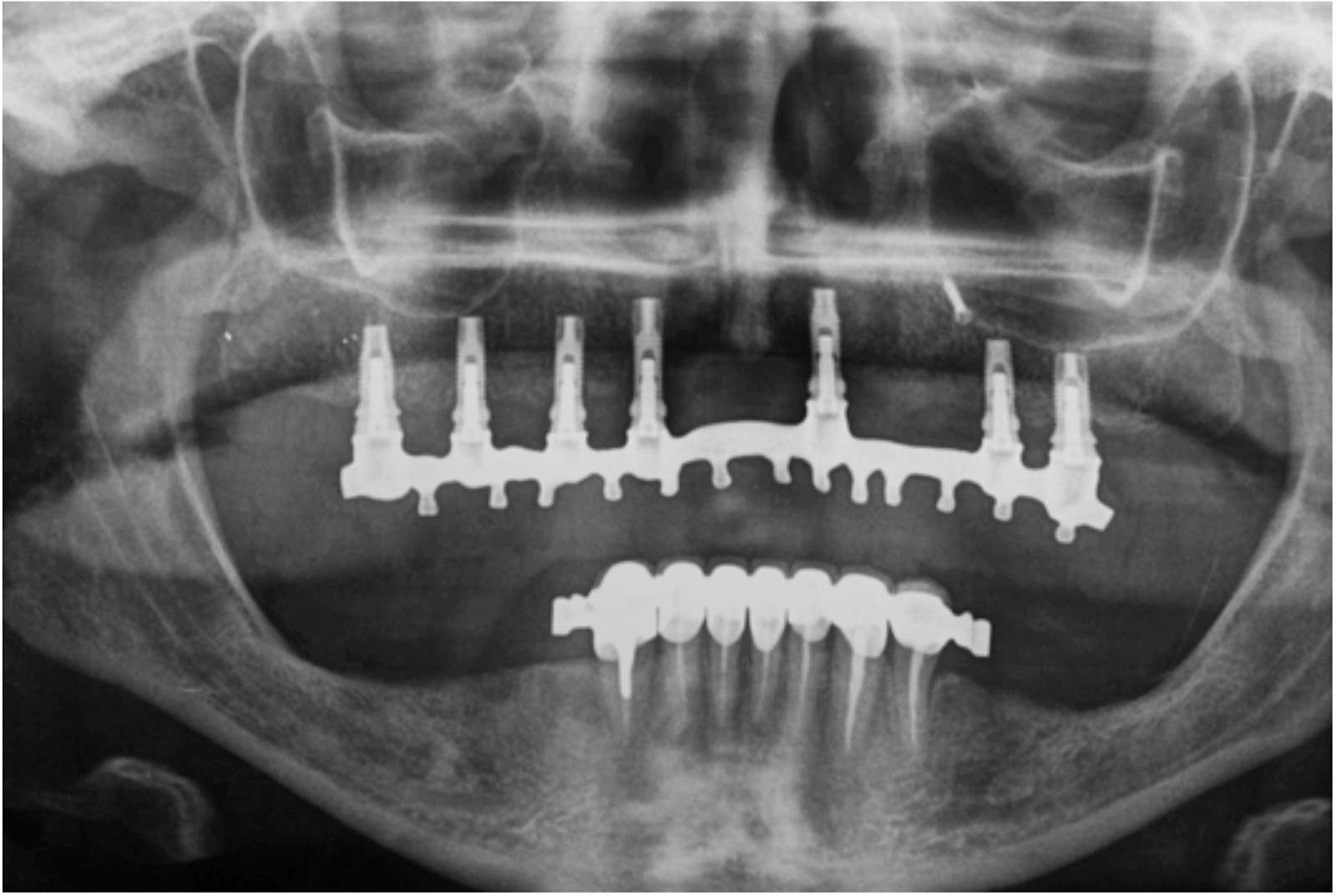
Dopo l’avvenuta osteointegrazione, il paziente è ritornato per la realizzazione dell’overdenture definitiva supportata da impianti. In questo caso gli impianti sono stati scoperti e sono stati applicati i monconi. Sono state rilevate le impronte a livello dell’impianto per la realizzazione del modello master dopo la guarigione dei tessuti perimplantari. Sono state realizzate le basi di registrazione e le registrazioni della relazione clinica delle arcate; i modelli sono stati montati in un articolatore semi-regolabile. È stata realizzata una protesi in cera mascellare ed è stata provata. Il clinico ha quindi determinato la dimensione verticale dell’occlusione, il supporto labiale, la relazione centrica e la posizione dei denti artificiali; il paziente ha approvato la disposizione estetica e si è proceduto alla realizzazione della protesi definitiva (figure 8a, 8b, 8c e 9).



CONCLUSIONI
La pianificazione del trattamento con TC e la chirurgia guidata al computer sono valori aggiunti per i clinici che possono migliorare la prognosi per un trattamento implantare e protesico di successo. La chirurgia guidata può risolvere una sfida clinica significativa nei casi di riassorbimento osseo o anatomia atipica che possono portare a un allineamento difficile per il posizionamento di impianti. La chirurgia guidata con TC può contribuire a una precisione maggiore e predicibile del posizionamento degli impianti e, di conseguenza, può aumentare il successo protesico e la soddisfazione del paziente. Ha dimostrato di essere utile anche per i restauri su impianti di elementi singoli, nonché per pazienti con edentulia multipla. È vantaggiosa soprattutto per coloro che richiedono restauri provvisori fissi e non vogliono indossare nessun tipo di protesi mobile. Il Biomet 3i Navigator System per chirurgia guidata, combinato con il software di pianificazione SimPlant e le guide chirurgiche di Materialise, ha assicurato un trattamento ottimale che ha risposto alle aspettative del paziente. Ora il Navigator System è disponibile anche per gli impianti Biomet 3i Tapered Implants.
Corrispondenza
Myron Nevins
Harvard School of Dental Medicine
188 Longwood Avenue - Boston, MA 02115
Tel. Office 781-596-2220 - nevinsperimp@aol.com
Bibliografia
1. Adell R, Lekholm U, Rockler B, Brånemark PI. A 15-year study of osseointegrated implants in the treatment of the edentulous jaw. Int J Oral Surg 198;10:387-416.
2. Albrektsson T, Zarb G, Worthington P, Eriksson AR. The long-term efficacy of currently used dental implants: a review and proposed criteria of success. Int J Oral Maxillofac Implants 1986;1:11-25.
3. van Steenberghe D, Lekholm U, Bolender C, Folmer T, Henry P, Herrmann I, Higuchi K, Laney W, Linden U, Astrand P. Applicability of osseointegrated oral implants in the rehabilitation of partial edentulism: a prospective multicenter study on 558 fixtures. Int J Oral Maxillofac Implants 1990;5:272-281.






{kind=link}