

L’endodonzia degli ultimi vent’anni è cambiata radicalmente. L’avvento dei sistemi rotanti in NiTi, unito all’integrazione di funzioni digitali nei micromotori, ha ridefinito le modalità di preparazione canalare, portando controllo e precisione a livelli prima impensabili. Queste innovazioni mirano a due obiettivi principali: migliorare la qualità della sagomatura rispettando l’anatomia del dente (e riducendo al minimo il rischio di frattura degli strumenti) e rendere il lavoro clinico più efficiente, rapido e sicuro.
In questo scenario, i micromotori endodontici “smart” rappresentano la frontiera più avanzata: combinano motori elettrici ad alta precisione con controllo digitale dei parametri operativi, programmi preimpostati, sensori intelligenti e, in alcuni modelli, connettività digitale.
In questo articolo esploreremo le caratteristiche, i vantaggi e le possibili criticità legate alla loro adozione, con uno sguardo alle prospettive future.
Cosa sono i micromotori endodontici smart
I micromotori endodontici sono dispositivi elettrici progettati per far ruotare o lavorare gli strumenti canalari regolando parametri fondamentali come velocità (rpm) e coppia (torque). Nei modelli tradizionali, collegati al riunito, la rotazione era continua e priva di controllo di coppia. Con il tempo sono arrivati i primi motori dedicati con torque control, poi le versioni cordless, fino agli attuali dispositivi smart, così definiti perché capaci di integrare tecnologie intelligenti come sensori, microprocessori, software di controllo e interfacce digitali evolute.
Le principali caratteristiche dei motori endodontici
- controllo digitale di velocità e coppia. Modulano automaticamente i parametri, rallentando o fermandosi quando la coppia supera i limiti impostati;
- programmi preimpostati. Sono disponibili preset ottimizzati (rpm, torque, modalità di rotazione) per sistematiche note (es. ProTaper, MTwoReciproc, WaveOne), con possibilità di memorizzare protocolli personalizzati;
- sensori integrati di feedback. Rilevano in tempo reale parametri come torsione, resistenza o carico sul file. Il software del motore interpreta questi dati e “risponde” alla resistenza del canale regolando automaticamente velocità e coppia o attivando funzioni di sicurezza come auto-stop (arresto del movimento) e auto-reverse (inversione della rotazione, in alcuni modelli basata anche sulla lunghezza misurata dall’EAL);
- modalità operative multiple e rilevatore apicale integrato (EAL). Permettono di lavorare in diverse modalità operative: solo motore, solo EAL, motore+EAL, modalità automatica. In quest’ultima, il motore adatta i parametri (velocità e coppia) in base alle informazioni apicali. La misurazione in tempo reale della lunghezza di lavoro durante la strumentazione riduce passaggi e ingombri ma può risultare meno precisa in presenza di irriganti conduttivi (che possono alterare la resistenza elettrica nel canale), canali molto curvi/complessi, file molto sottili/flessibili (che possono ridurre la continuità elettrica tra strumento e motore) o settaggi inappropriati;
- connettività e tracciabilità dei dati. È possibile registrare dati di utilizzo (tempo, rpm, torque, numero di file utilizzati) ed esportarli tramite USB o via Bluetooth, facilitando monitoraggio clinico, audit o formazione;
- design ergonomico e batteria ricaricabile. I motori moderni sono compatti, leggeri e spesso cordless, migliorando il comfort dell’operatore e garantendo autonomia durante le sedute cliniche.
Coppia (torque). È la forza di torsione applicata al file mentre ruota all’interno del canale. Monitorarla in tempo reale consente di sapere quanto stress meccanico sta subendo lo strumento.
Angolo di rotazione. È l’ampiezza con cui il file ruota attorno al suo asse durante il movimento. Nei sistemi reciprocanti, controllare l’angolo permette di modulare l’avanzamento dello strumento e ridurre picchi di stress, deformazioni o trasporto canalare.
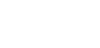
La Tabella 1 sintetizza le principali differenze tra motori endodontici tradizionali e smart.
In sintesi, i motori smart non si limitano a far ruotare lo strumento: interpretano ciò che accade nel canale e adattano il movimento per proteggere file e dente, semplificando il lavoro quotidiano e ottimizzando sicurezza ed efficienza della preparazione canalare.
Dalla generazione analogica alla generazione smart
2000–2005: 1ª generazione
Motori elettrici di base, con rotazione continua e controllo manuale di velocità e coppia. In questi anni nascono anche i primi dispositivi specificamente pensati per gli strumenti in NiTi, sebbene ancora molto semplici.
2006–2010: 2ª generazione
Si diffonde la regolazione della coppia e vengono introdotti i primi sistemi di auto-reverse meccanico o elettronico. Aumenta la compatibilità con le prime sistematiche NiTi, come ProTaper Universal.
2011–2014: 3ª generazione
Arrivano i motori programmabili, dotati di memorie interne e preset per alcune sistematiche. Compaiono anche le prime soluzioni cordless, inizialmente con autonomia limitata. In questa fase si consolida l’uso dei sistemi NiTi rotanti nella pratica quotidiana.
2015–2018: 4ª generazione
Vengono introdotte interfacce digitali più evolute (display più grandi, menu più completi) e un numero crescente di preset dedicati a sistematiche come WaveOne, Reciproc, ProTaper Next. Compaiono le prime forme di feedback adattivo basate sul carico, sebbene ancora prive di sensori integrati veri e propri. Si diffondono motori cordless con batterie più stabili.
2019–2021: 5ª generazione – fase di transizione verso lo smart
I motori integrano software più sofisticati e algoritmi in grado di analizzare in tempo reale il carico sul file, con funzioni di auto-reverse e auto-stop più precise. I dispositivi diventano più leggeri e compatti, e compaiono le prime forme di connettività di base, principalmente tramite USB.
2022–2025: 6ª generazione – i veri motori smart
Si introducono sensori integrati (torsione, resistenza, carico meccanico) che forniscono feedback in tempo reale. Gli algoritmi diventano predittivi, adattando istantaneamente velocità e coppia per proteggere sia il file sia la struttura dentale. La connettività si fa avanzata (Bluetooth, integrazione con software clinici o app mobile), i preset diventano completamente personalizzabili e arrivano aggiornamenti firmware periodici.
Le interfacce diventano più user-friendly e compaiono le prime funzioni di tracciamento del trattamento.
Criteri di scelta e workflow clinico
Come selezionare un micromotore smart
Quando si valuta l’acquisto o l’adozione di un nuovo motore, devono essere considerati:
- compatibilità con le principali sistematiche e possibilità di memorizzare nuovi preset;
- ampiezza di regolazione di rpm e torque perché possa adattarsi a strumenti diversi;
- presenza di funzioni di sicurezza e feedback avanzati (auto-reverse, overload detection, monitoraggio in tempo reale della coppia/angolo, segnali di allarme);
- ergonomia e mobilità (prediligere un motore leggero, compatto e, possibilmente, cordless);
- interfaccia intuitiva e chiara, memorizzazione di protocolli, eventuale possibilità di esportazione dati;
- disponibilità di assistenza tecnica e ricambi;
- rapporto costo/beneficio in termini di efficienza e sicurezza.
Workflow operativo consigliato
Ecco un possibile workflow ottimizzato con micromotore smart:
- valutazione pre-operatoria con rx endorale periapicale e, se necessaria, CBCT;
- apertura camerale e scouting canalare con irrigazione preliminare;
- programmazione del micromotore con preset o protocollo personalizzato in base al file selezionato;
- strumentazione con monitoraggio in tempo reale di torque e resistenza;
- irrigazione intermedia e finalizzazione della sagomatura;
- misurazione della lunghezza di lavoro finale e otturazione canalare;
- esportazione dei dati clinici (velocità, coppia, tempo di utilizzo dei file).
Benefici e limiti
L’adozione di un micromotore smart può offrire diversi vantaggi:
- maggiore sicurezza e standardizzazione del protocollo endodontico;
- riduzione del rischio di incidenti iatrogeni, come fratture dei file o trasporto del canale;
- tempi operativi potenzialmente più brevi, soprattutto nei casi complessi o con pazienti poco collaboranti;
- miglior ergonomia e minore affaticamento dell’operatore;
- tracciabilità più accurata del trattamento, utile per audit interni e attività formative.
Tuttavia, questi benefici devono essere valutati con senso critico.
Restano infatti alcuni limiti:
- costo iniziale più elevato;
- necessità di familiarizzare con nuove interfacce, aggiornamenti software e sistemi di gestione dei dati;
- accuratezza variabile dell’EAL integrato in condizioni complesse;
- assenza, al momento, di solide evidenze cliniche a lungo termine sugli outcome;
- la tecnologia non sostituisce la competenza dell’operatore: abilità, conoscenza anatomica, qualità dell’irrigazione e corretta gestione clinica restano elementi imprescindibili.
Prospettive future
Le prospettive future dei micromotori endodontici smart si collocano all’incrocio tra automazione, connettività e intelligenza artificiale.
Si tratta di un’evoluzione già in corso, che promette di accompagnare l’operatore in modo sempre più preciso, prevedibile e personalizzato.
Automazione e robotica
L’ingresso della robotica in odontoiatria rappresenta uno dei passi più significativi verso un’assistenza procedurale avanzata. Sebbene oggi sia applicata soprattutto alla chirurgia implantare, l’endodonzia sta iniziando a beneficiare dei primi sistemi dedicati.
Un esempio è DentiBot, progettato specificamente per le procedure canalari: combina sensori di forza e coppia con un controllo ibrido posizione/forza che permette di compensare i micro-movimenti del paziente, ridurre il rischio di frattura del file e mantenere un percorso operativo stabile. Le valutazioni precliniche su modelli anatomici hanno confermato la fattibilità del sistema, suggerendo un futuro in cui l’operatore potrebbe essere supportato da un’assistenza robotica in tempo reale.
Connettività e big data
L’archiviazione di parametri come coppia, velocità, tempo di utilizzo, numero di strumenti e andamento della preparazione potrebbe consentire:
- l’ottimizzazione continua dei protocolli clinici, basata su evidenze interne allo studio;
- la manutenzione predittiva degli strumenti, identificando quando un file deve essere sostituito;
- una formazione più efficace, supportata da dati reali e non solo da osservazione diretta.
In un contesto in cui l’odontoiatria digitale è sempre più centrale, questa disponibilità di informazioni potrà diventare parte integrante del processo diagnostico e terapeutico.
Intelligenza artificiale
In futuro, un motore smart potrebbe:
- riconoscere automaticamente il file inserito e suggerire i parametri ideali;
- adattare dinamicamente il movimento (torque, angolo e velocità) in funzione dell’anatomia specifica del dente (curvatura e diametro canalare, spessore dentinale) e dello stress rilevato;
- prevedere il rischio di deformazione o frattura di un file.
L’integrazione con l’IA potrebbe quindi trasformare il micromotore da semplice esecutore a vero supporto decisionale intelligente, rendendo la preparazione canalare più precisa e sicura.
I micromotori endodontici smart rappresentano un progresso reale e ormai consolidato. Uniscono sicurezza, efficienza e controllo operativo, ma la loro efficacia dipende ancora dall’esperienza clinica dell’operatore, dalla conoscenza anatomica e dalla qualità della detersione chimica del sistema canalare.
L’evoluzione verso tecnologie integrate come Intelligenza Artificiale, robotica e sistemi digitali potrebbe ampliare ulteriormente il ruolo dei motori endodontici smart, trasformandoli in partner digitali destinati a ridefinire la pratica endodontica nei prossimi anni.
- Cheng HF, Ho YC, Chen CW. DentiBot: System Design and 6-DoF Hybrid Position/Force Control for Robot-Assisted Endodontic Treatment. IEEE Transactions on Automation Science and Engineering (Volume: 22); 21412 – 21429 19 September 2025.
- La Rosa GRM, Angjelova A, Jovanova E, et al. Integrated electronic apex locators for determining working length: a systematic review of in-vitro studies. Odontology. 2025 Jul;113(3):918-929.
- Portillo Martínez MA, et al. Accuracy of integrated apex locators in endodontic motors according to the type of file used: comparison between manual and mechanized files. Rev Cient Odontol (Lima). 2025.
- Portillo Martínez MA, Duarte L, Vega M, et al. Accuracy of integrated apex locators in endodontic motors according to the type of file used: comparison between manual and mechanized files. Rev Cient Odontol (Lima). 2025 Aug 31;13(3):e254.
- Reynette C, Giess R, Davril JM, et al. Influence of endodontic motors on the behaviour of root canal shaping instruments: an in vitro comparative study. BDJ Open 2023;9(1):51.
- Setzer FC, Li J, Khan AA. The Use of Artificial Intelligence in Endodontics. J Dent Res. 2024 Aug;103(9):853-862.
- Tomer AK, Mittal N, et al. Recent Advances in Endodontic Motors and Handpiece. International Journal of Medical Sciences & Innovative Research (IJMSIR) 2019.


{kind=link}